Fusion 360
Fusion 360에서개체를엽니다. 이예제에서개체는플라스틱부품입니다. 이프로젝트의목표는세개의구멍과그아래쪽의부품주변에서여분의재료를제거하는것입니다.
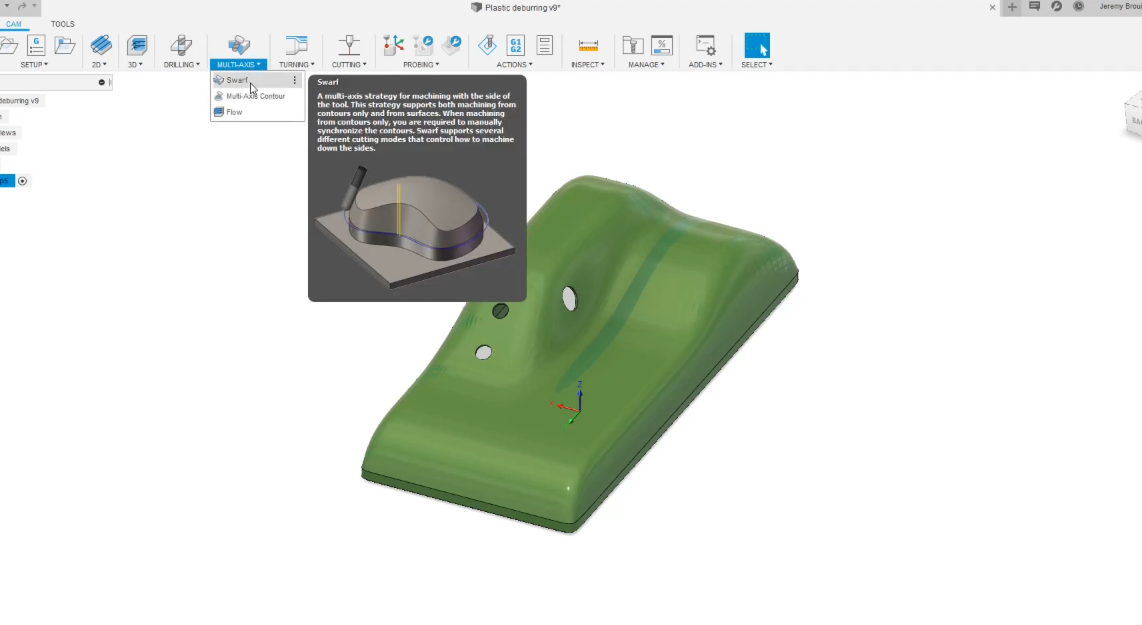
먼저 Fusion의 '제조' 작업영역탭에있는지확인해야합니다. 다음단계에따라도구경로를만들어야합니다:
1.다중 축을 선택한다음스와프 도구를선택합니다.
2.사용하려는도구를선택한다음(이예에서는 RoboDK 스테이션의사용자지정도구를사용하겠습니다) 구멍을선택하여첫번째경로를만듭니다.
3.서페이스의오른쪽에공구경로를가져오려면다른 면 가공을 선택한다음확인을 선택합니다. 각구멍에대해이절차를따릅니다.
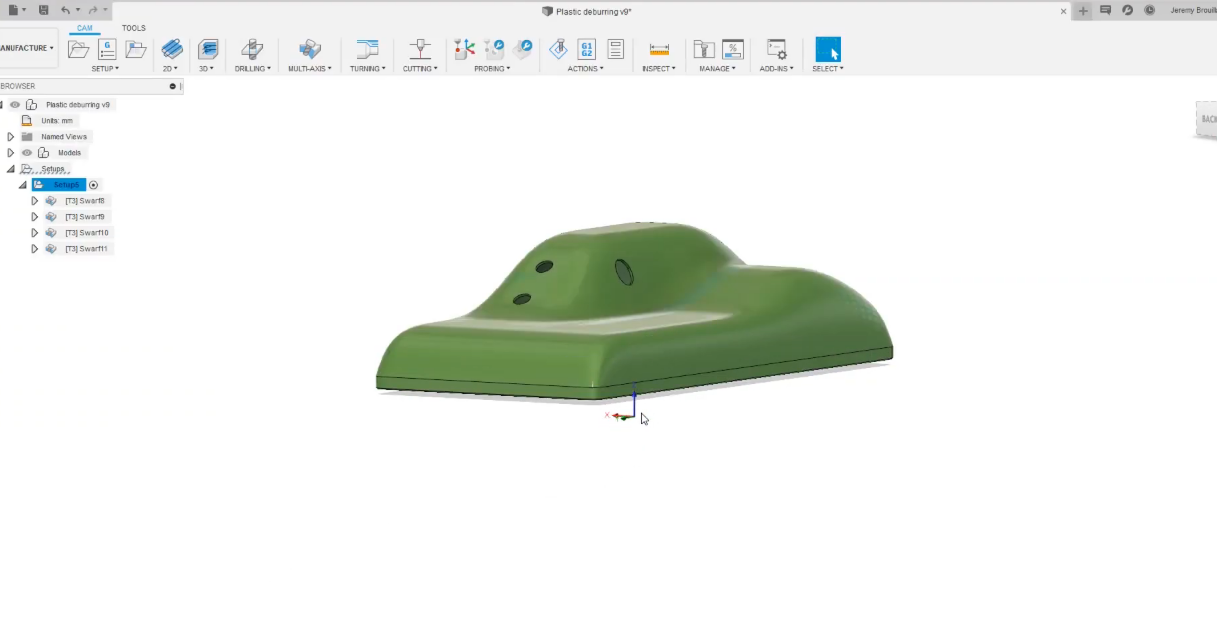
4.하단부분에도동일한작업을수행하려면스와프 도구를선택한다음하단 부분을 선택합니다.
5.계산이완료되면방금만든경로를시뮬레이션합니다: 설정을 선택한다음시뮬레이션을 선택합니다.
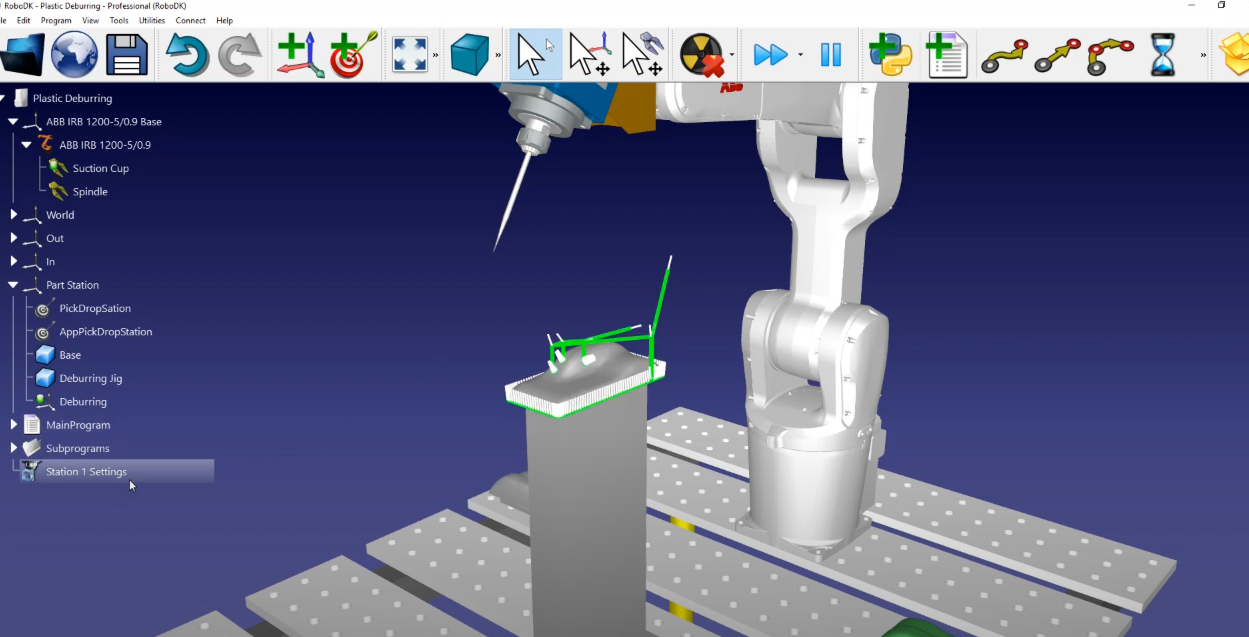
로봇에대한완전한도구경로를갖게됩니다. "디버링" 기준프레임이활성화되어있는지확인하려면 RoboDK로돌아가야합니다. 그러기위해서는다음을수행해야합니다:
RoboDK로이동: 디버링을 선택한다음레퍼런스 프레임 활성화를 선택합니다.
이제디버링기준프레임이활성화되었으므로해당기준프레임과관련하여프로그램이내보내집니다. e는 Fusion 360으로돌아가서이미지가표시된것과같은지확인합니다:
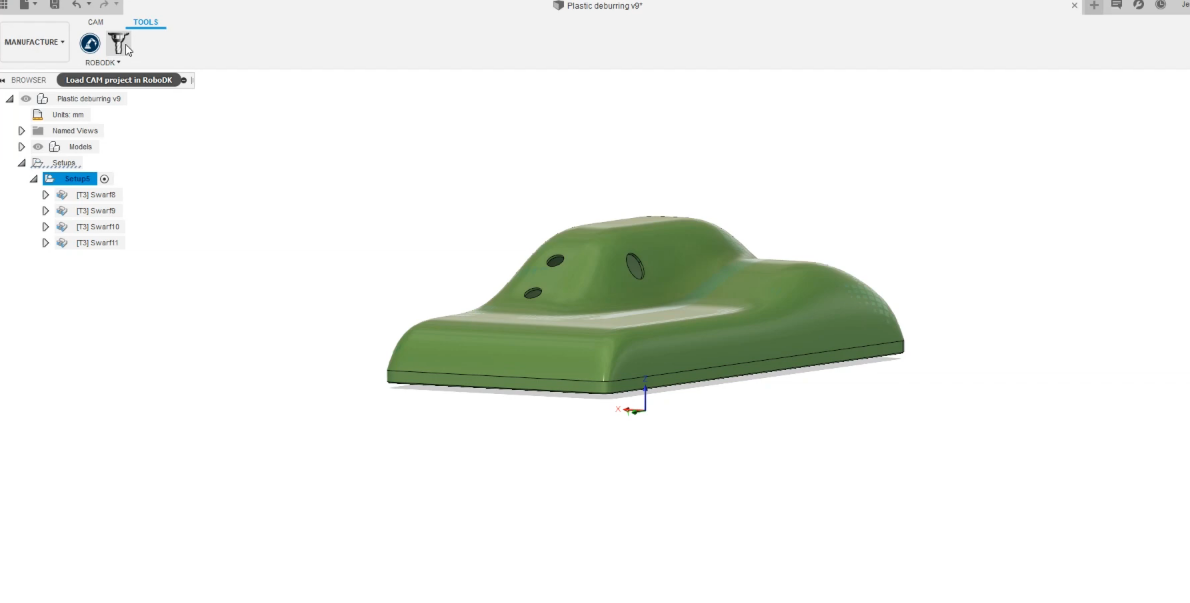
다음단계에따라 RoboDK에스케치를로드합니다:
1.Fusion 360에는 RoboDK 플러그인이있습니다. RoboDK에서 CAM 프로젝트 로드를 선택하기만하면됩니다.
2.RoboDK로돌아가면그자리에서절단경로를찾을수있습니다. "플라스틱디버링"이라는 "가공프로젝트"가생성되었습니다: 디버링을 선택한다음표시를선택합니다.
3.절단도구경로의이름을 "Station1 설정"으로변경할수있습니다: 플라스틱 디버링을 마우스 오른쪽 버튼으로 클릭하여 이름을변경합니다.