RoboDK
RoboDK에서로봇공구경로를준비했으면가상로봇셀이실제설정과일치하는지확인해야합니다. RoboDK에서는로봇프로그램을생성하기전에제조작업에올바른도구와참조프레임을사용하고있는지확인합니다.
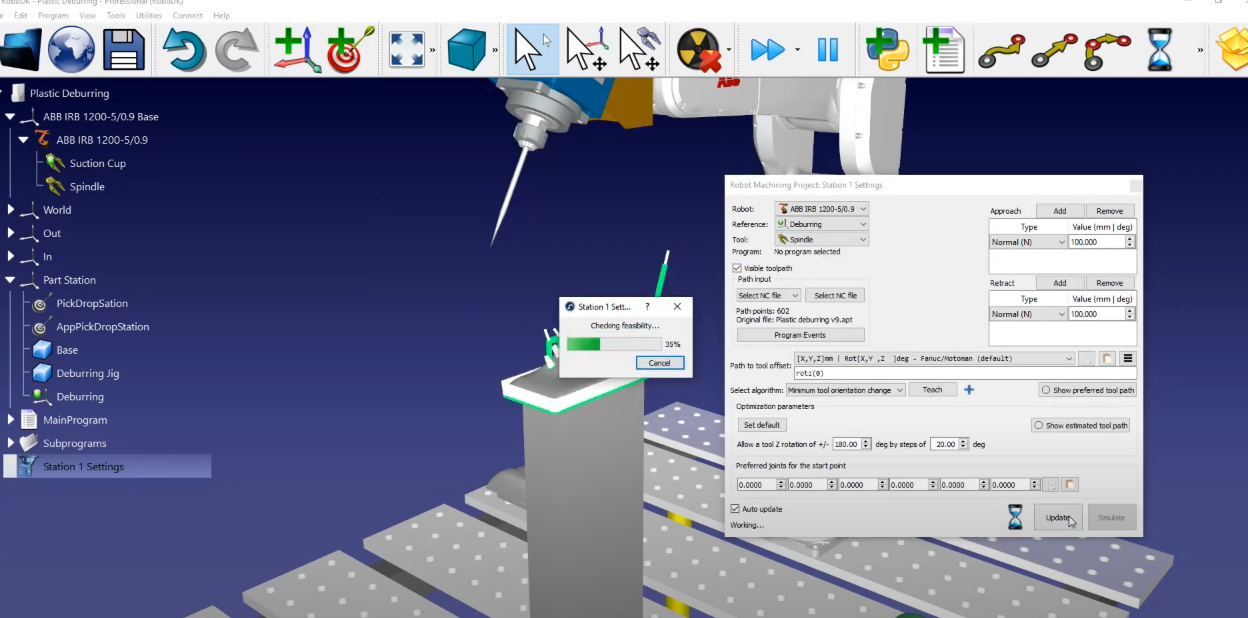
이예에서는디버링 참조를선택하고도구를스핀들로 선택했습니다. 업데이트➔ 시뮬레이션을 선택합니다.
경로섹션의순서를바꾸거나감각을전환하려면다음단계를따르세요:
1.CAM 프로젝트에는일반적으로접근및후퇴동작이이미포함되어있으므로이를제거하면됩니다: "접근" 및"후퇴"로이동하여제거를 선택하기만하면됩니다. 업데이트를 선택한다음시뮬레이션을 선택합니다.
2.이예제에서는기본매개변수가유효한결과를생성합니다. 변경할수있는유일한추가설정은스핀들을활성화및비활성화하는것입니다: 프로그램 이벤트 열기➔각옵션을선택해제하여"경로접근" 및"경로후퇴"에서브루틴을추가하고경로접근에"스핀들 (1)"을, 경로후퇴에"스핀들 (0)"을작성합니다. 여기에는스핀들을활성화또는비활성화하는매개변수를수용할수있는함수가컨트롤러에정의되어있다고가정합니다.
3.업데이트를 선택합니다.
이제 "스테이션 1"을생성한프로그램의이름을수정하고 "메인프로그램"을실행해야합니다.
마지막으로해야할일은로봇프로그램을생성하는것입니다. ABB 로봇을사용하므로 ABB의독점프로그래밍언어인 RAPID를사용하는 ABB 로봇컨트롤러용모드파일을내보내야합니다.
1.올바른포스트프로세서를사용했는지확인합니다: 스테이션 선택➔ 포스트 프로세서 선택➔ ABB RAPID IRC 5.
2.Station1 프로그램을마우스오른쪽버튼으로클릭하고로봇 프로그램 생성을 선택합니다.
텍스트편집기에서로봇프로그램을자동으로볼수있습니다. ABB 로봇컨트롤러에필요한모든특정이동명령과구문을볼수있습니다.