스폿 용접
스폿용접은로봇시뮬레이션소프트웨어를사용해야하는가장일반적인작업중하나입니다. 이가이드에서는차체패널의자동스폿용접을위해로봇을시뮬레이션하고프로그래밍하는방법을설명합니다.
샘플은 예제 라이브러리에서 확인할 수 있습니다: 스폿 용접 스테이션 링크.
요구 사항
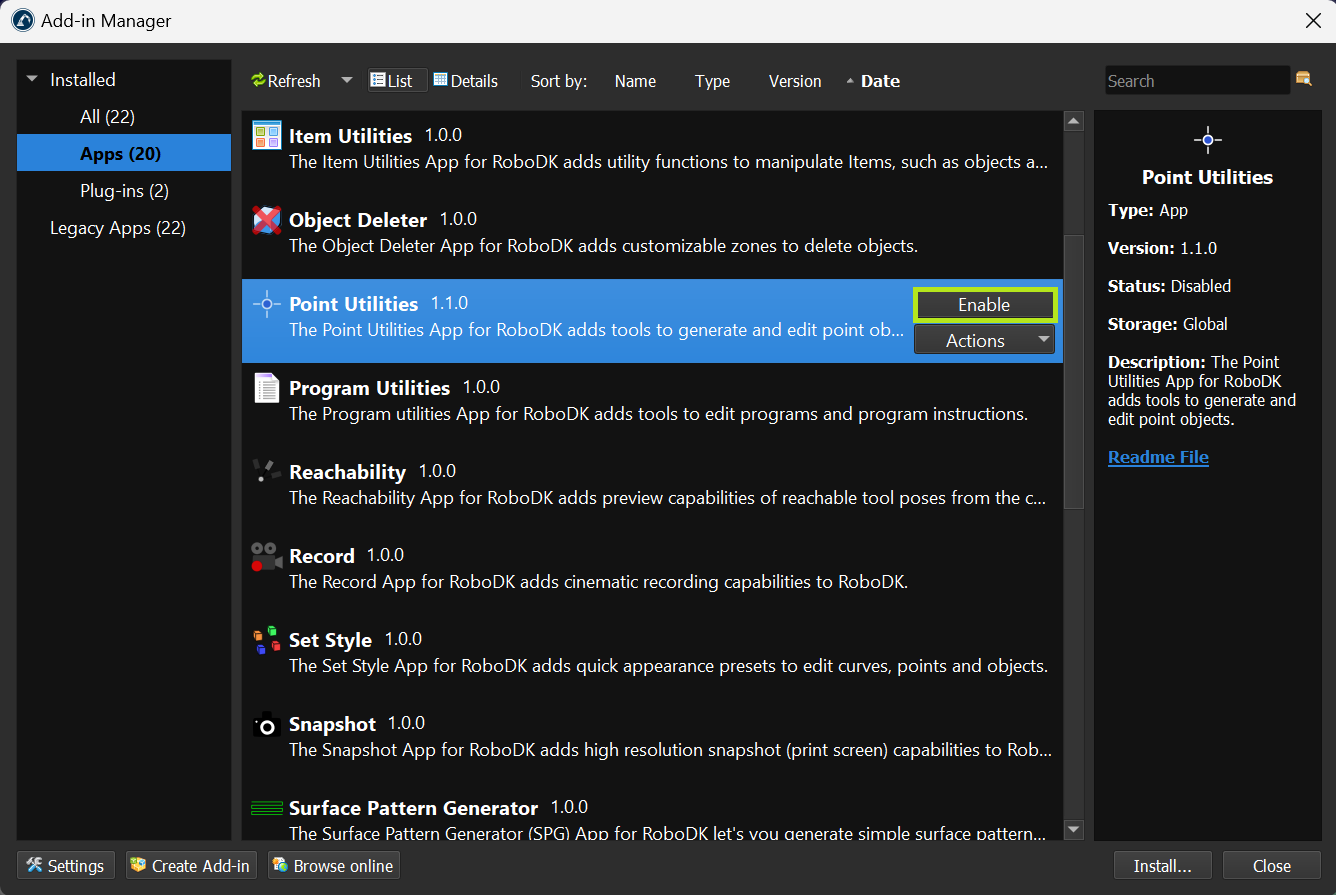
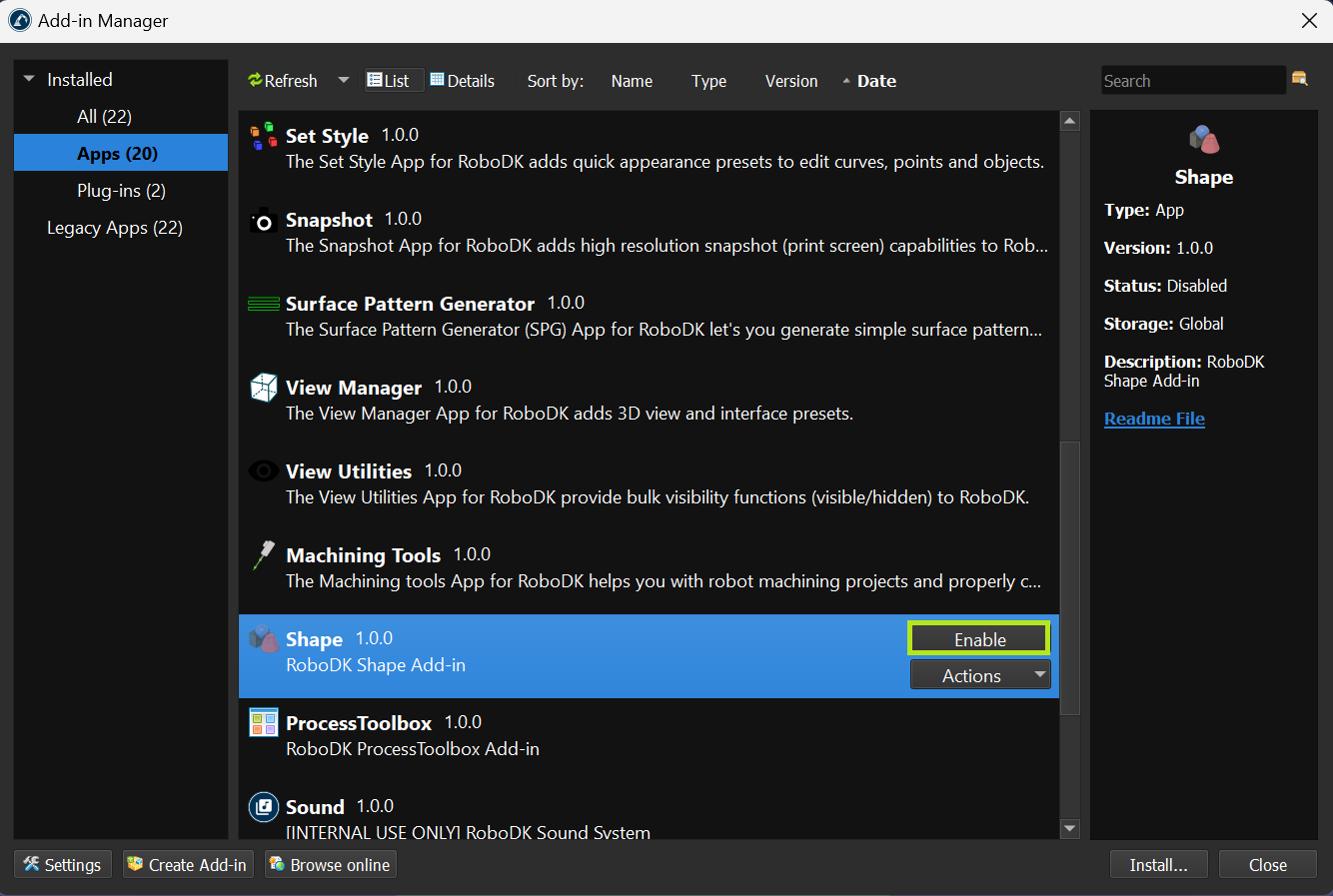
스폿용접예제를제대로만들려면 RoboDK v5.5.4 이상을사용해야합니다. 이버전에는스폿용접프로젝트를쉽게생성할수있는포인트 유틸리티와셰이프 추가기능(Shape Add-in)이포함되어있습니다.
워크플로
이섹션에서는충돌없는플래너플러그인을사용하여충돌없는경로자동생성을포함한스폿용접시뮬레이션을만드는방법을안내합니다.
이섹션에서는스폿용접프로젝트를만드는과정을다음단계로나눠서설명합니다:
1.필요한모든모델, 로봇, 도구를로드하세요.
2.도구(TCP)를설정합니다.
3.타겟을만듭니다.
4.로봇경로/궤적을생성하고확인합니다.
5.경로를분석합니다.
6.프로그램순서를구성합니다.
7.로봇프로그램을생성합니다.
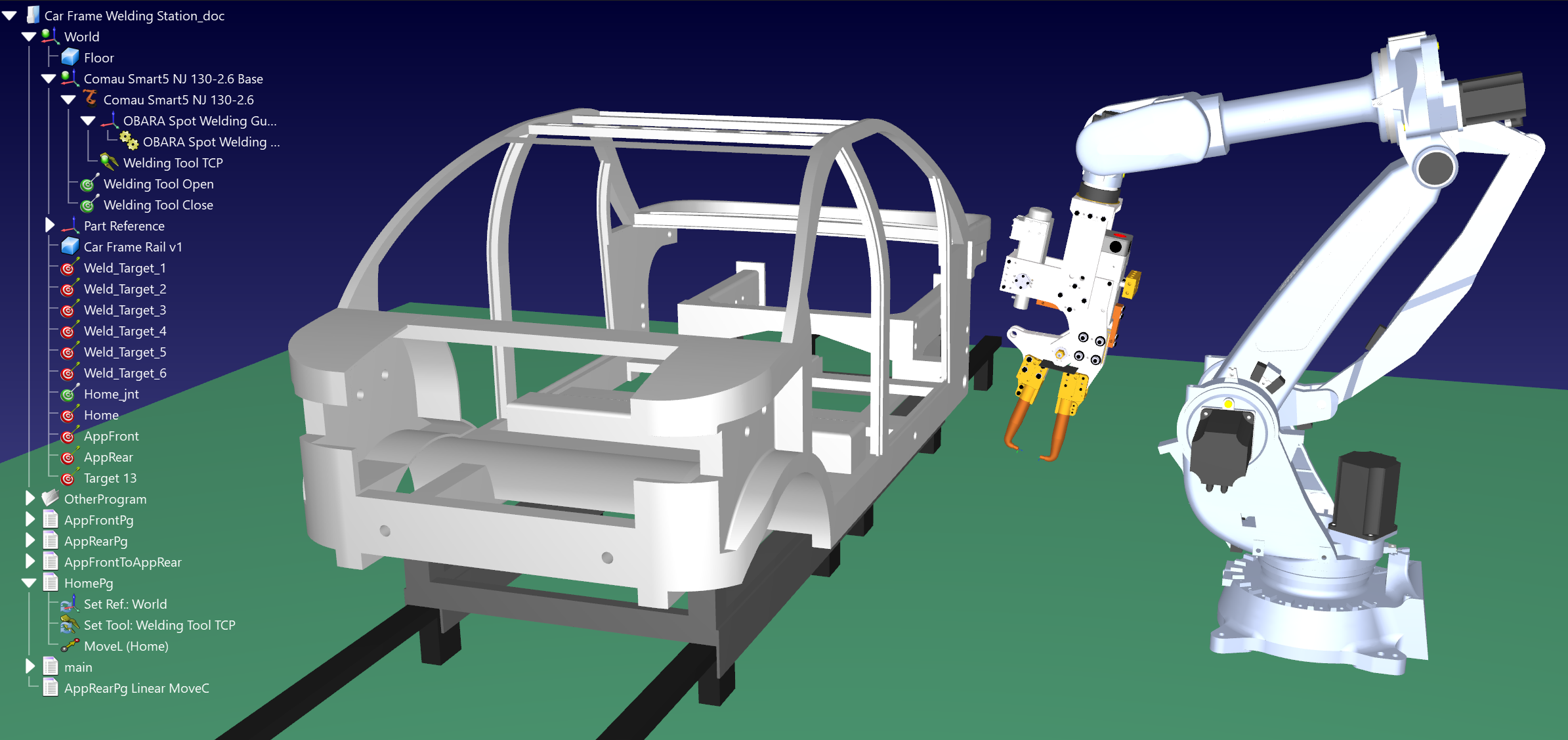
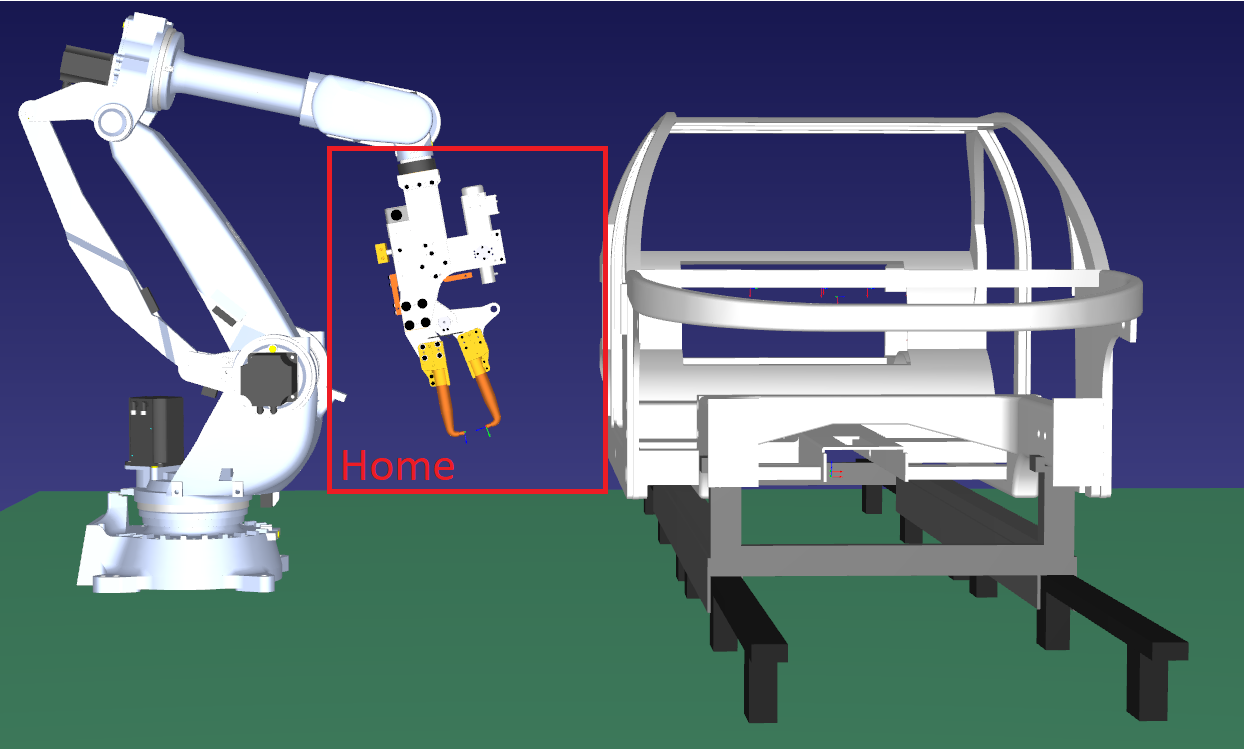
스테이션 구성 요소
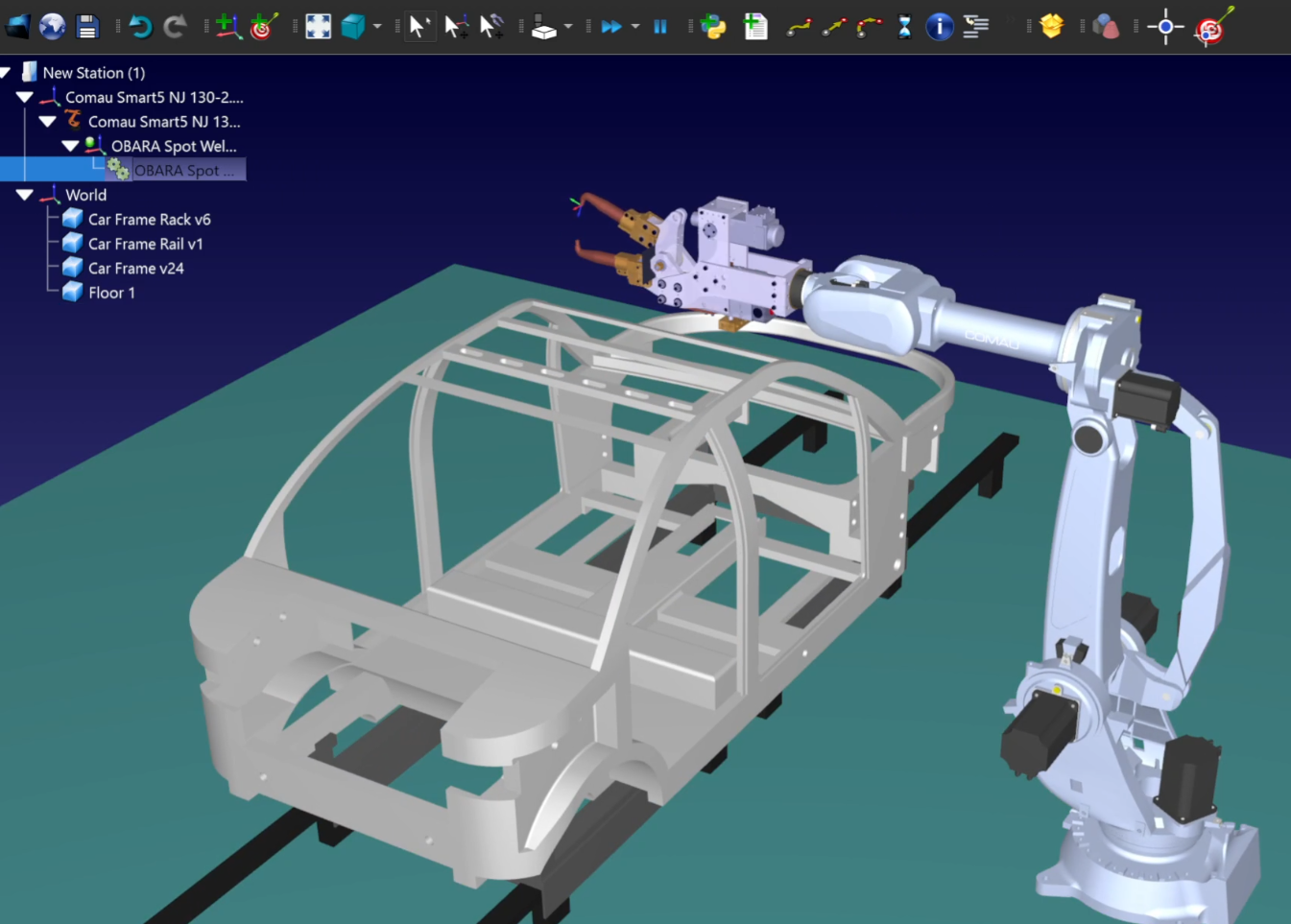
먼저로봇도구로로봇과스폿용접건을로드해야합니다.
RoboDK 온라인 라이브러리에서 다음컴포넌트를사용할수있습니다:
1.로봇: 코마우 스마트5 NJ 130-2.6
2.도구: OBARA 스폿 용접 건
받침대와고정물은로컬파일을사용하여로드되며, 바닥을만들기위해 모양 추가 Shape Add-in기능()을사용합니다. 자세한내용은 시작 가이드 및 모양 추가 기능 문서를 참조하세요.
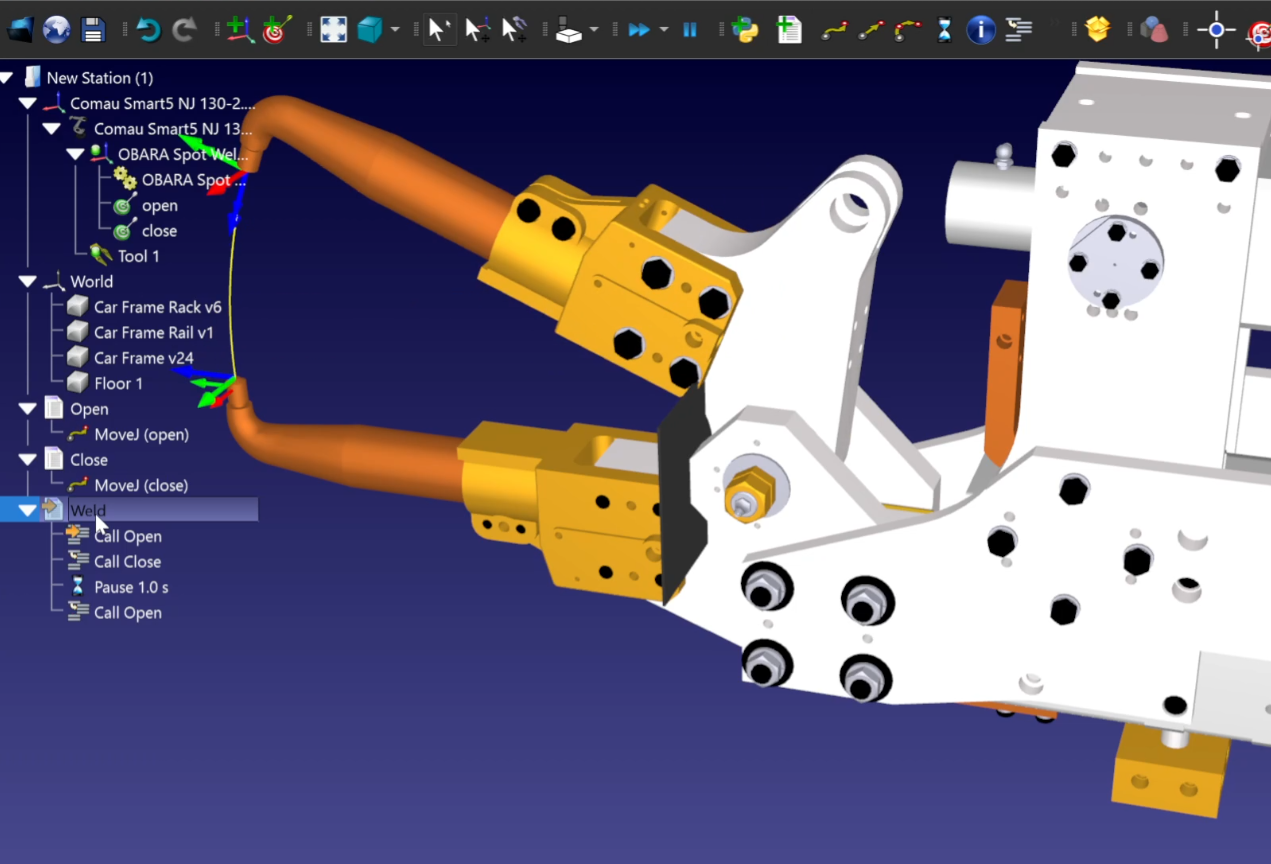
스폿 용접 건
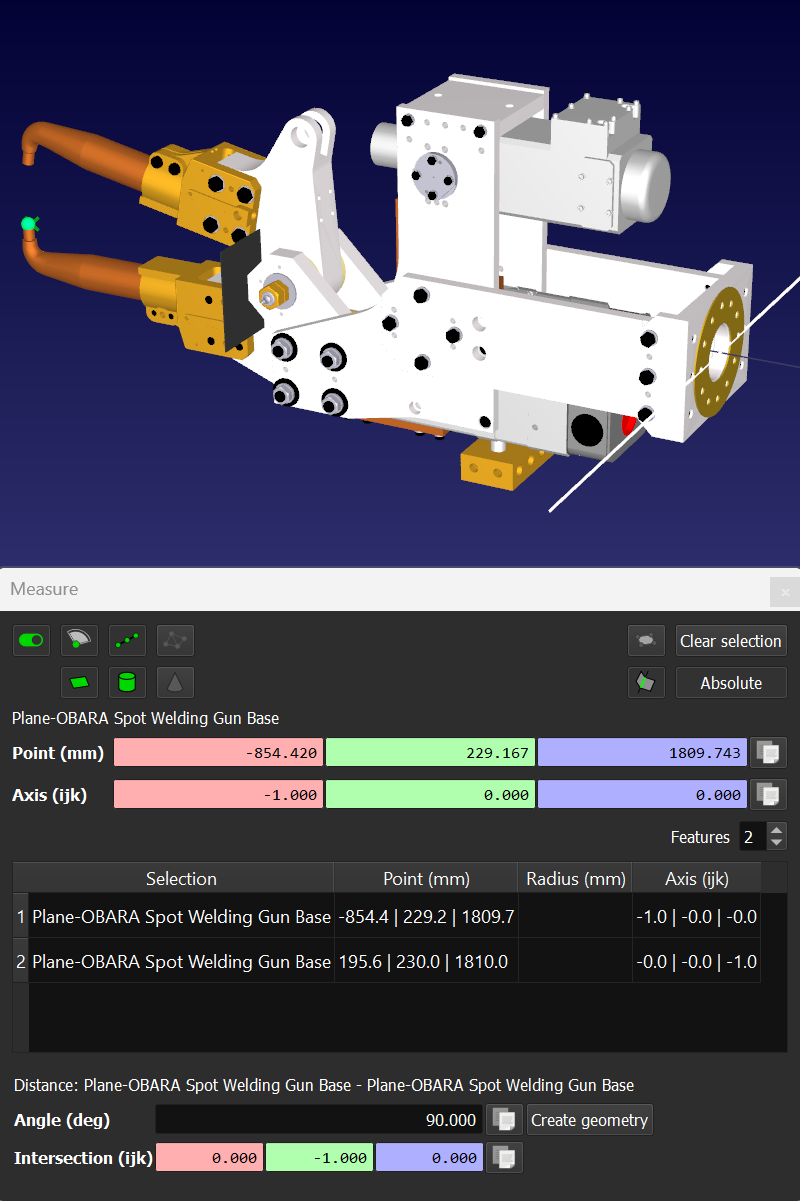
이섹션에서는스폿용접총의움직임을애니메이션하고공구중심점(TCP)을만드는방법을보여줍니다.
이동식클램핑부품이있는스폿용접건을추가하려면해당 TCP를정의하고메커니즘을별도로부착해야합니다. 도구-측정을 선택하여플랜지에대한 TCP 포인트의위치를측정할수있습니다.
스폿용접건을열고닫을두개의조인트타겟을생성할수있습니다. 이러한타겟은프로그램에서스폿용접프로세스를시뮬레이션하는데사용할수있습니다:
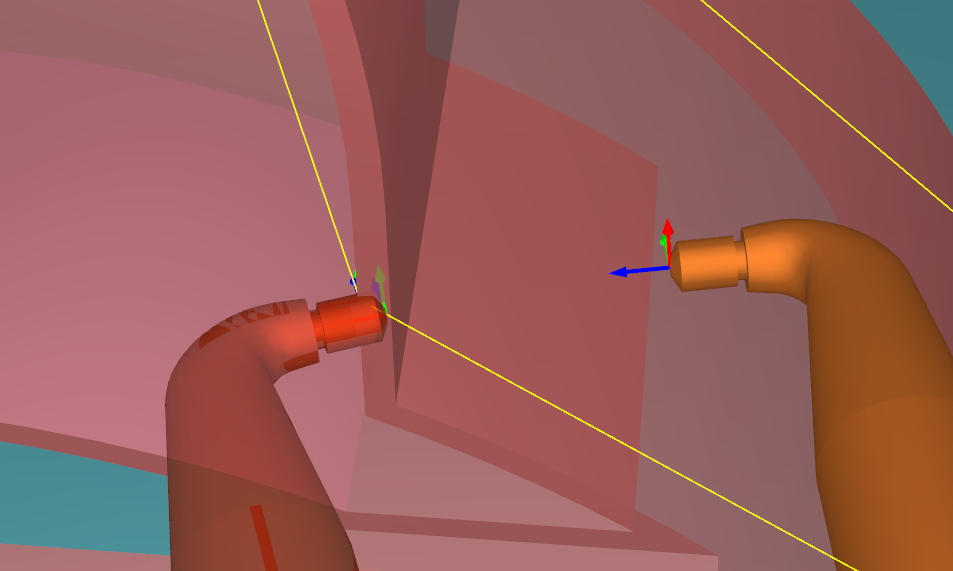
스폿 용접 포인트
이섹션에서는스폿용접건을이동할자동차프레임에스폿용접지점을만드는방법을설명합니다.
자동차프레임의전면과후면부분을스폿용접해야한다고가정해보겠습니다. 포인트유틸리티Add-in을사용하면표면에직접스폿용접포인트를배치할수있습니다. 포인트를타깃으로변환한후(이는포인트유틸리티추가기능에내장된기능입니다) TCP 각도를기준으로타깃의방향을다시정렬할수있습니다:
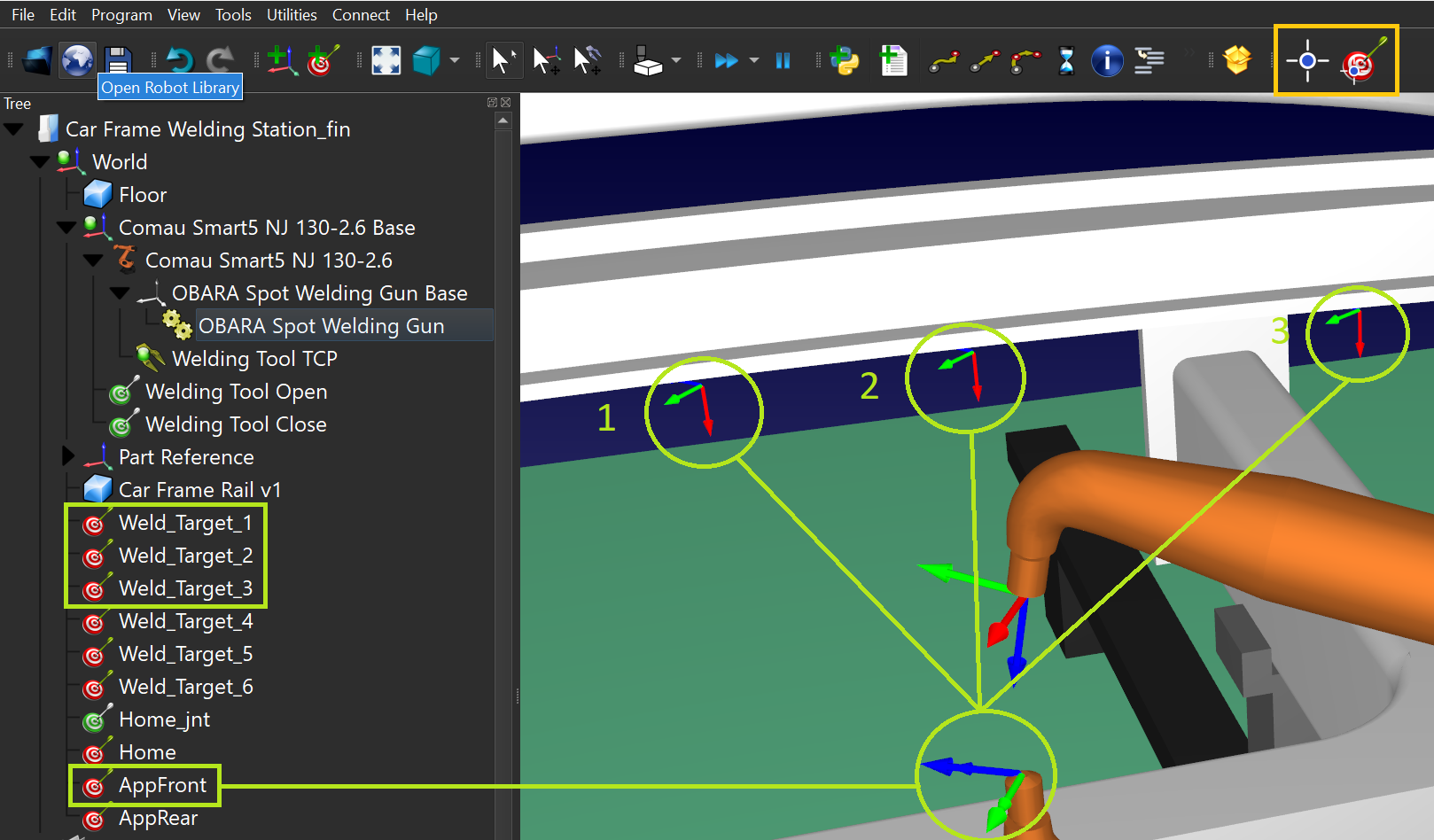
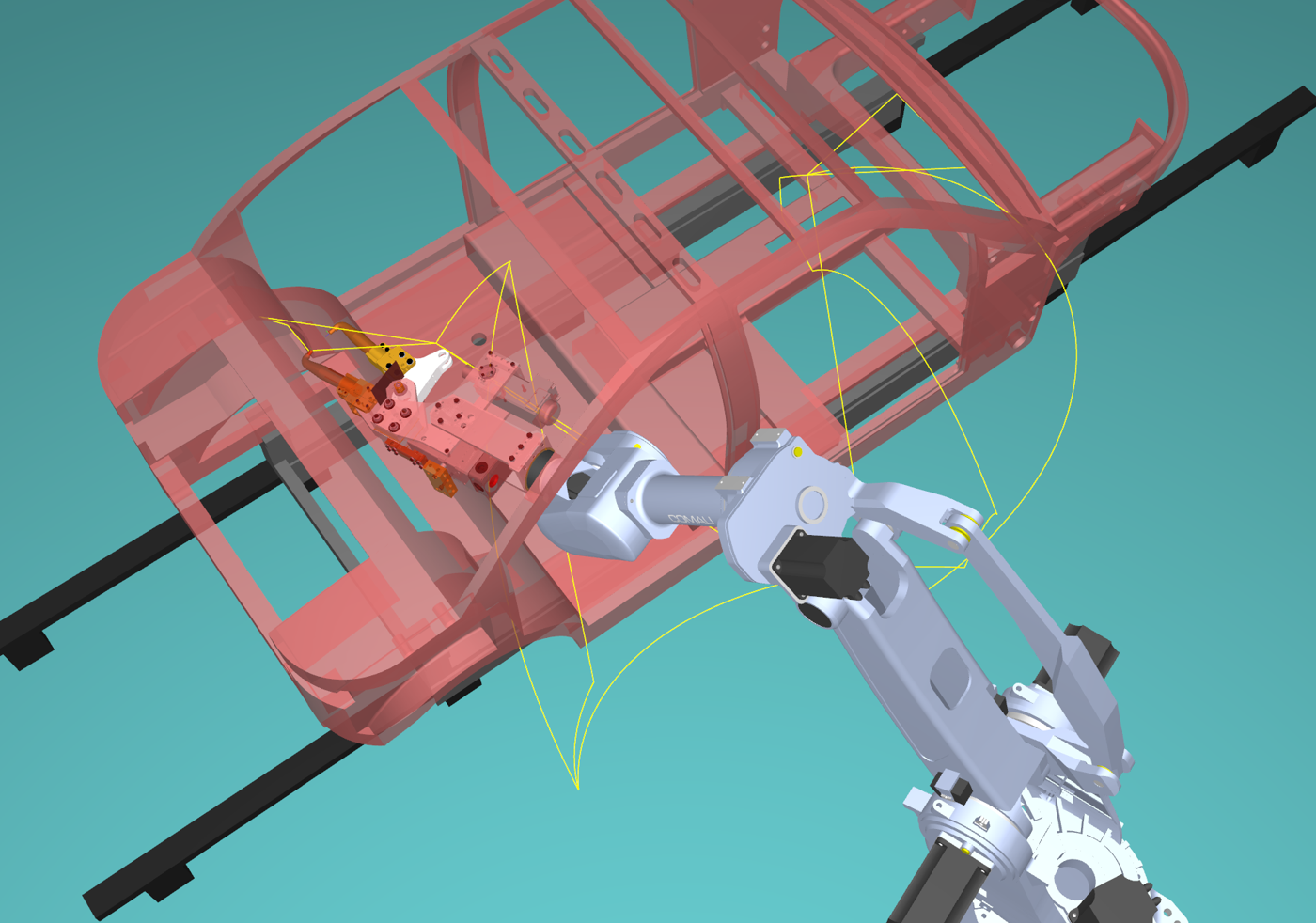
궤적 계획
이섹션에서는자동차프레임내부의두지점사이에충돌없는경로를만드는방법을보여줍니다.
차량프레임에는전방에서후방으로쉽게접근하지못하게하는포스빔이있으므로프레임내부를통과할수있는접근타깃을두개만들어야합니다.
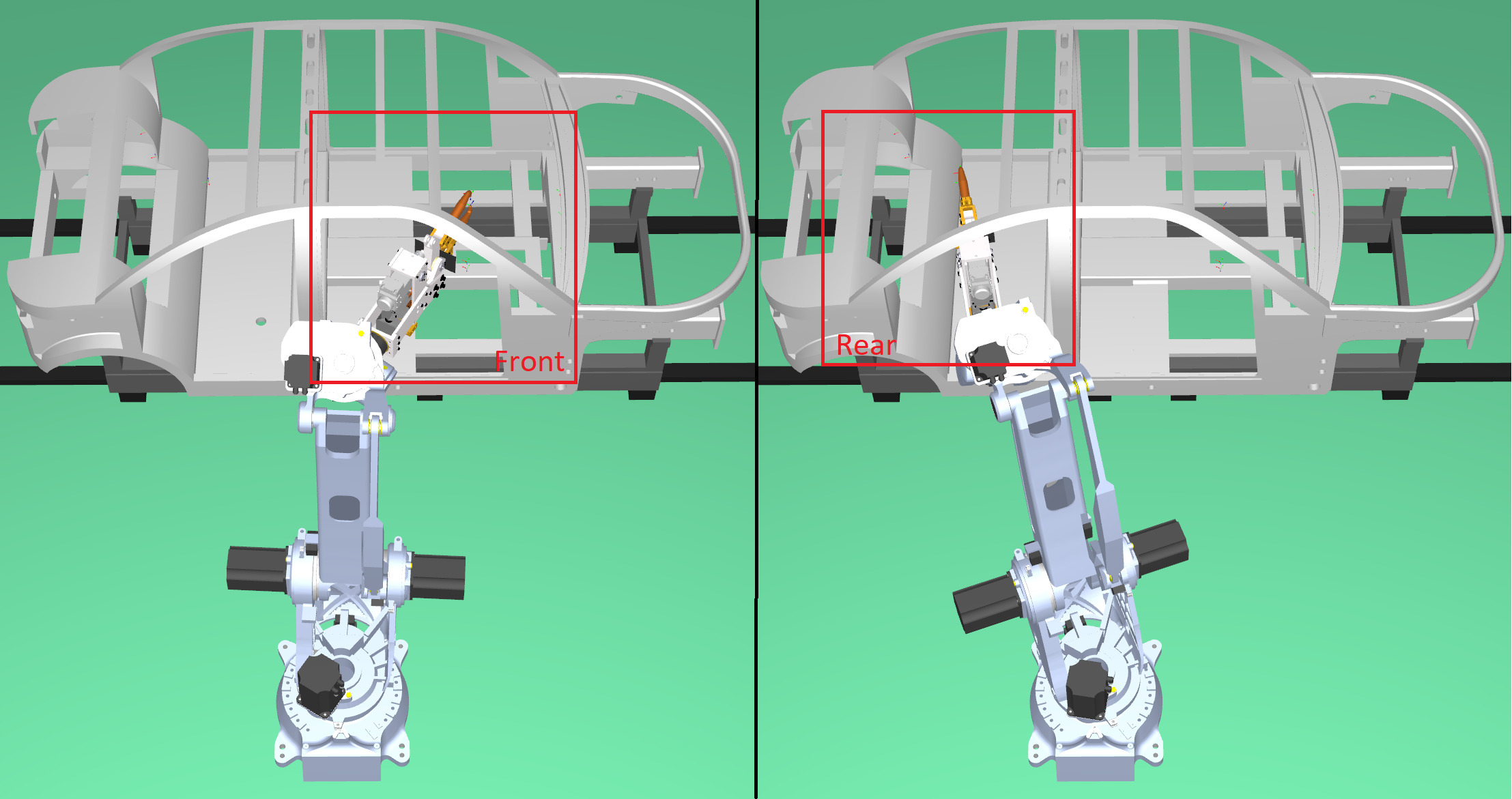
또한두접근타깃사이에중간타깃을만들어야합니다. 스폿용접타겟의도구위치를기반으로접근타겟을만들수있습니다.
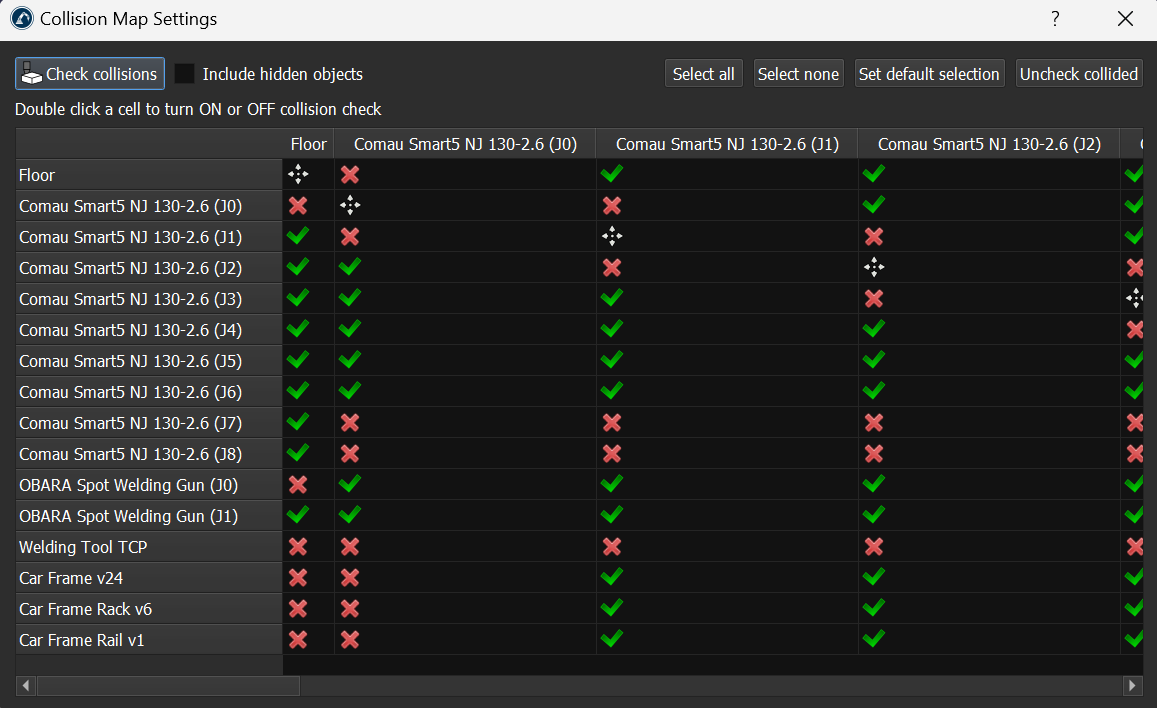
충돌 감지
경로를확보한후에는충돌이있는지다시확인하고충돌맵을올바르게정의했는지확인할수있습니다.
도구➔충돌 확인을 선택하여부품이충돌하는지확인할수있습니다. 이렇게하면충돌감지를활성화/비활성화할수있습니다.
그런다음도구->콜리전 맵을 선택하여콜리전 맵을구성할수있습니다.
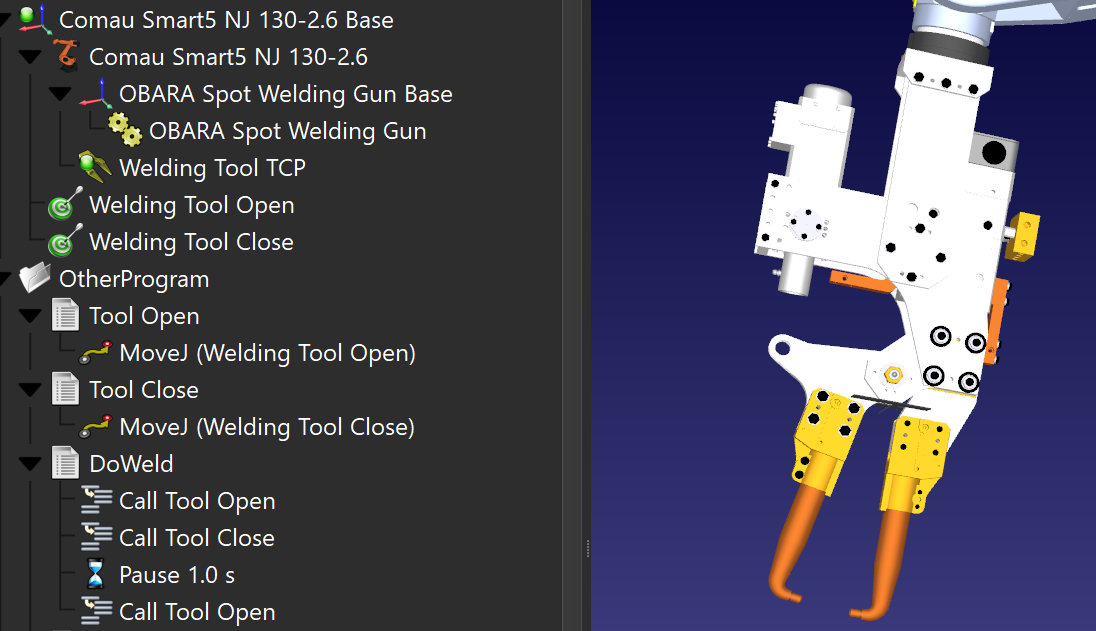
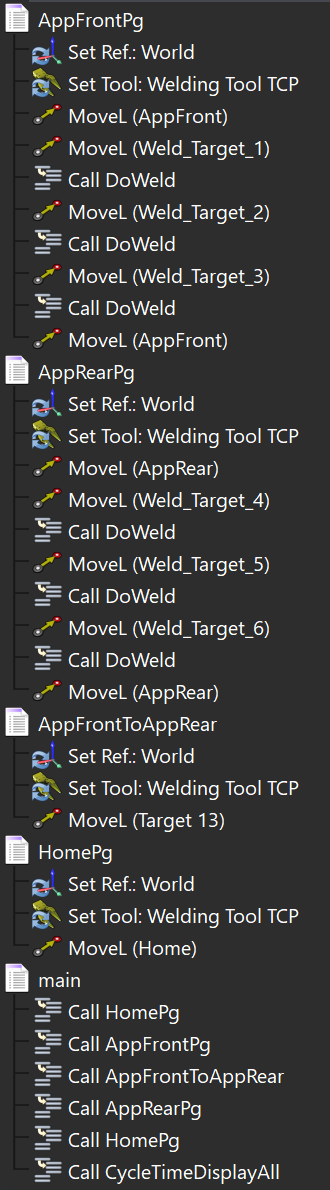
프로그램 시퀀스
이섹션에서는스폿용접시퀀스를메인프로그램과하위프로그램으로분할하여시뮬레이션과생성된프로그램을체계적으로관리할수있도록도와줍니다.
향후수정및/또는팀협업을위해시뮬레이션을여러프로그램으로분할하는것이좋습니다. 이방송국에서는여러루틴이포함된메인프로그램을사용합니다:
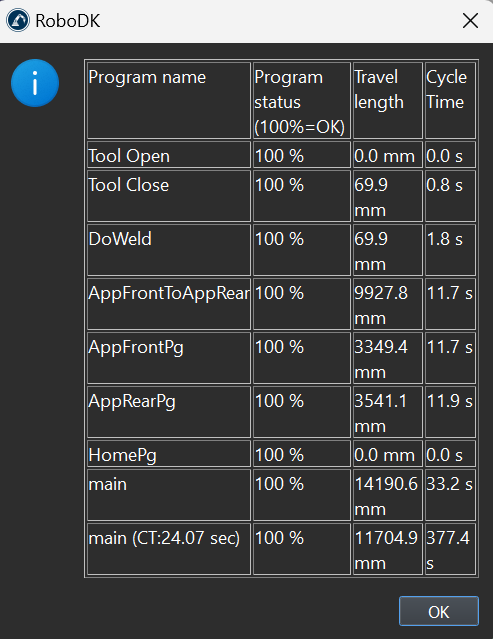
주기 시간 추정
이섹션에서는스폿용접시뮬레이션의예상사이클시간을계산하고표시하는방법을보여줍니다.
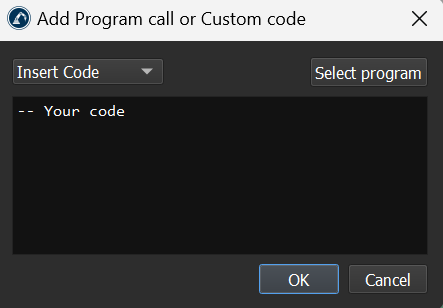
C:\RoboDK\라이브러리\스크립트 폴더에서 CycleTimeDisplayAll.py 스크립트를로드하기만하면프로그램에시간추정기능을쉽게추가할수있습니다. 그런다음메인프로그램에서호출할수있습니다:
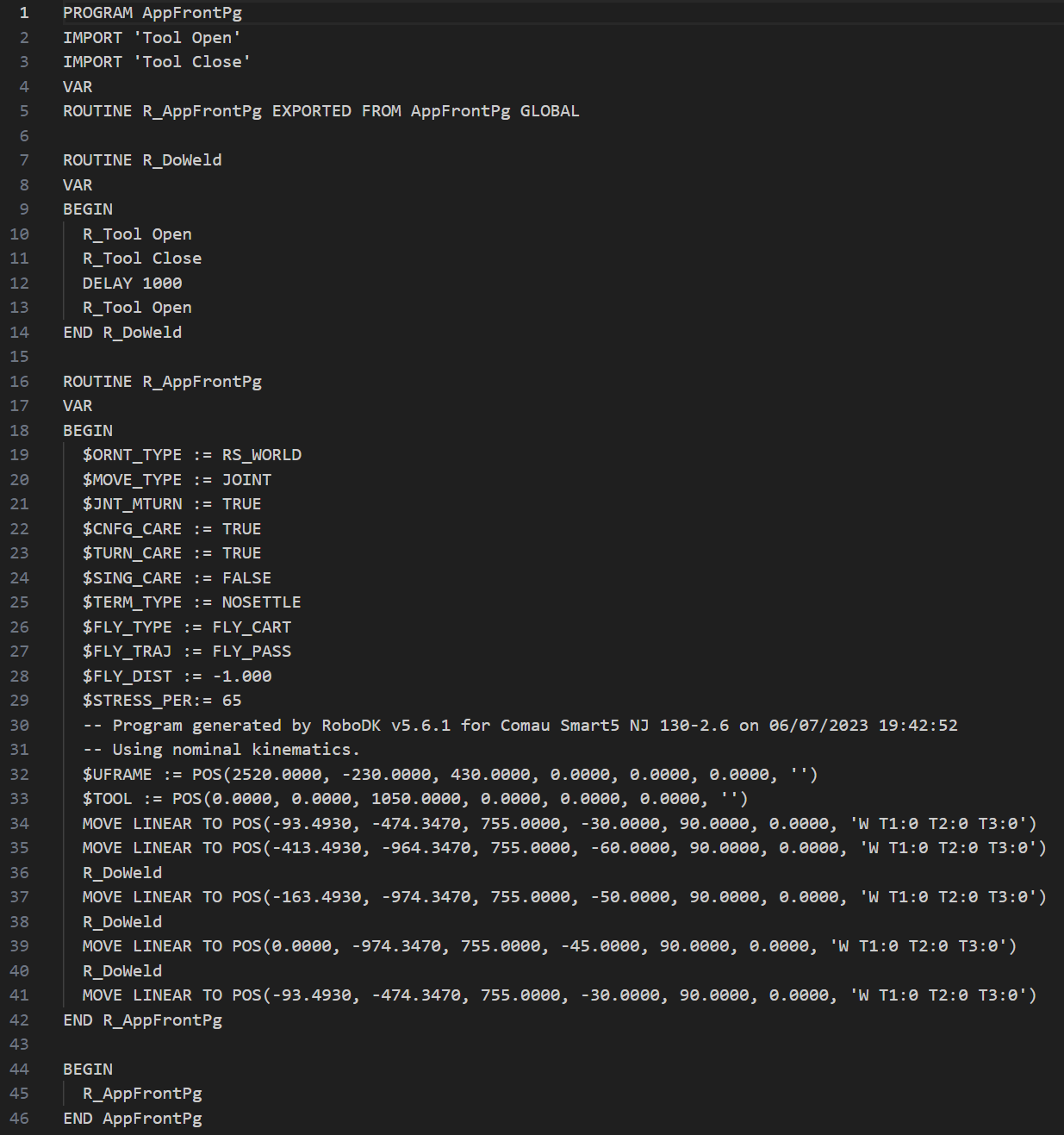
로봇 프로그램 생성
스폿용접애플리케이션에대한유효한시뮬레이션시퀀스를확보하면몇번의클릭만으로프로그램을생성할수있습니다.
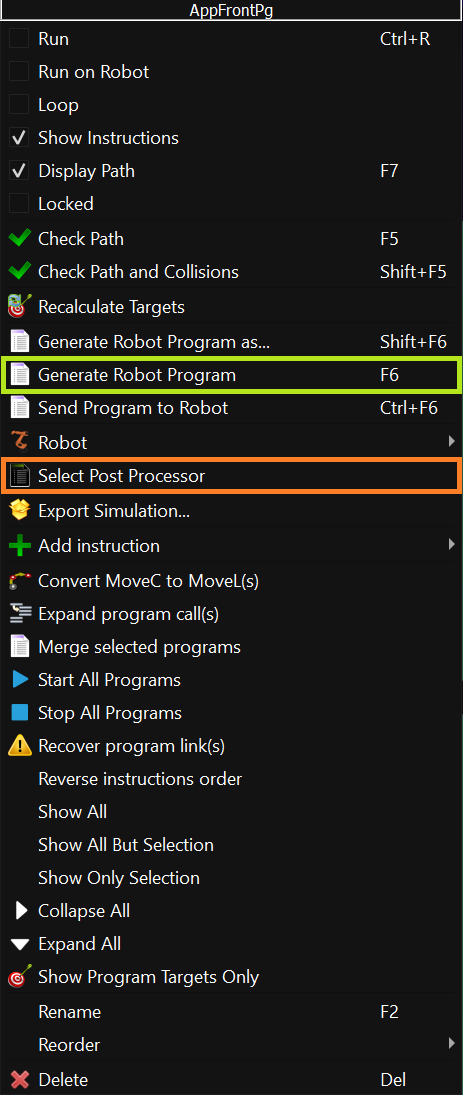
프로그램을마우스오른쪽버튼으로클릭하고로봇 프로그램 생성을 선택하여로봇에대해생성할프로그램을선택합니다.