설정
먼저솔리드웍스에서파트와용접경로를임포트해야합니다.
팁: 솔리드웍스에서파트, 커브, 포인트를가져오는방법에대한자세한내용은첫번째동영상(https://www.youtube.com/watch?v=mF6Fn6HxHJ8)을참조하세요.
SolidWorks에서프로젝트를가져옵니다:
1.SolidWorks의RoboDK 탭으로자동 설정을 선택합니다.
2.용접경로를선택합니다. 로봇도구의방향을잡는데도움이되는면도선택해야합니다.
3.이제 SolidWorks에서경로를가져왔으므로 RoboDK로이동할수있습니다.
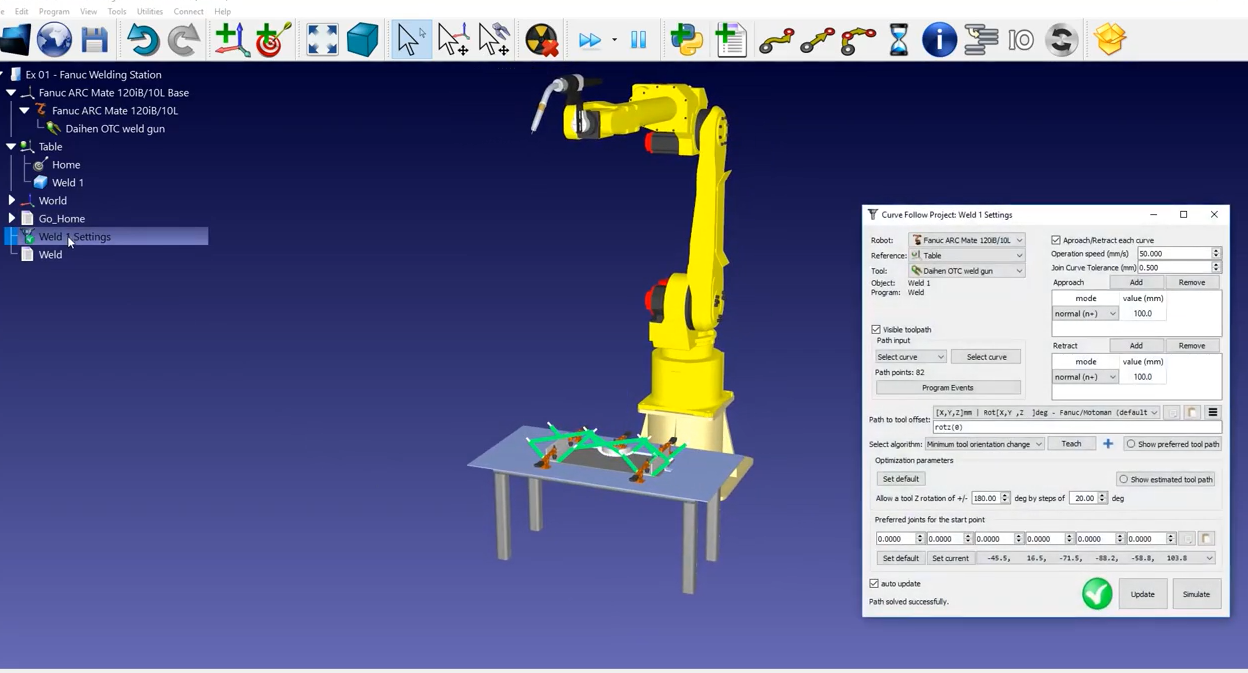
4.스테이션트리에서용접1 설정을 클릭하면커브 팔로우 프로젝트가 열립니다.
5.업데이트를 클릭하여프로그램을생성한다음시뮬레이션을 클릭합니다.