Welding with Positionner
소개
이예제는탱크용접시뮬레이션에 RoboDK를사용하는방법을보여줍니다. 이예제에는탱크샘플모델과단일축포지셔너와페어링된 ABB 용접로봇이있는로봇셀이포함되어있습니다.
로봇 용접 예제
이로봇용접프로젝트를진행하려면먼저기본라이브러리에서포지셔너를사용한RoboDK 로봇용접예제를선택해야합니다. 그런다음Fusion 360에서용접경로를선택해야합니다. 그런다음RoboDK에서로봇경로를조정해야합니다.
모델 가져오기
먼저 Fusion 360에서파트와용접경로를가져와야합니다.
Fusion 360에서모델을가져옵니다:
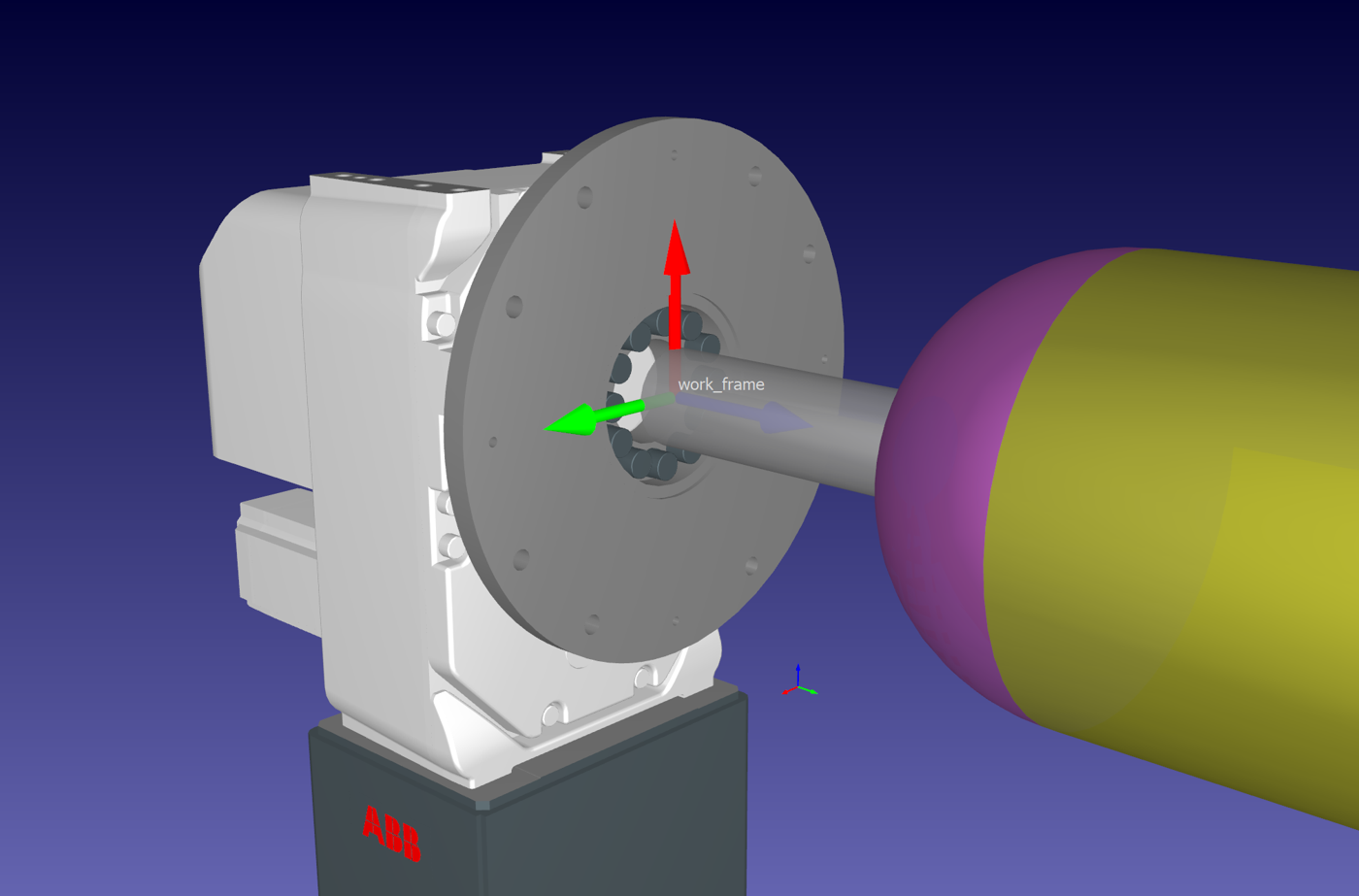
1.RoboDK에서탱크부착을위한포지셔너플랜지기준프레임을선택합니다.
2.Fusion 360 유틸리티의RoboDK 탭으로이동하여모델 로드를 선택합니다.
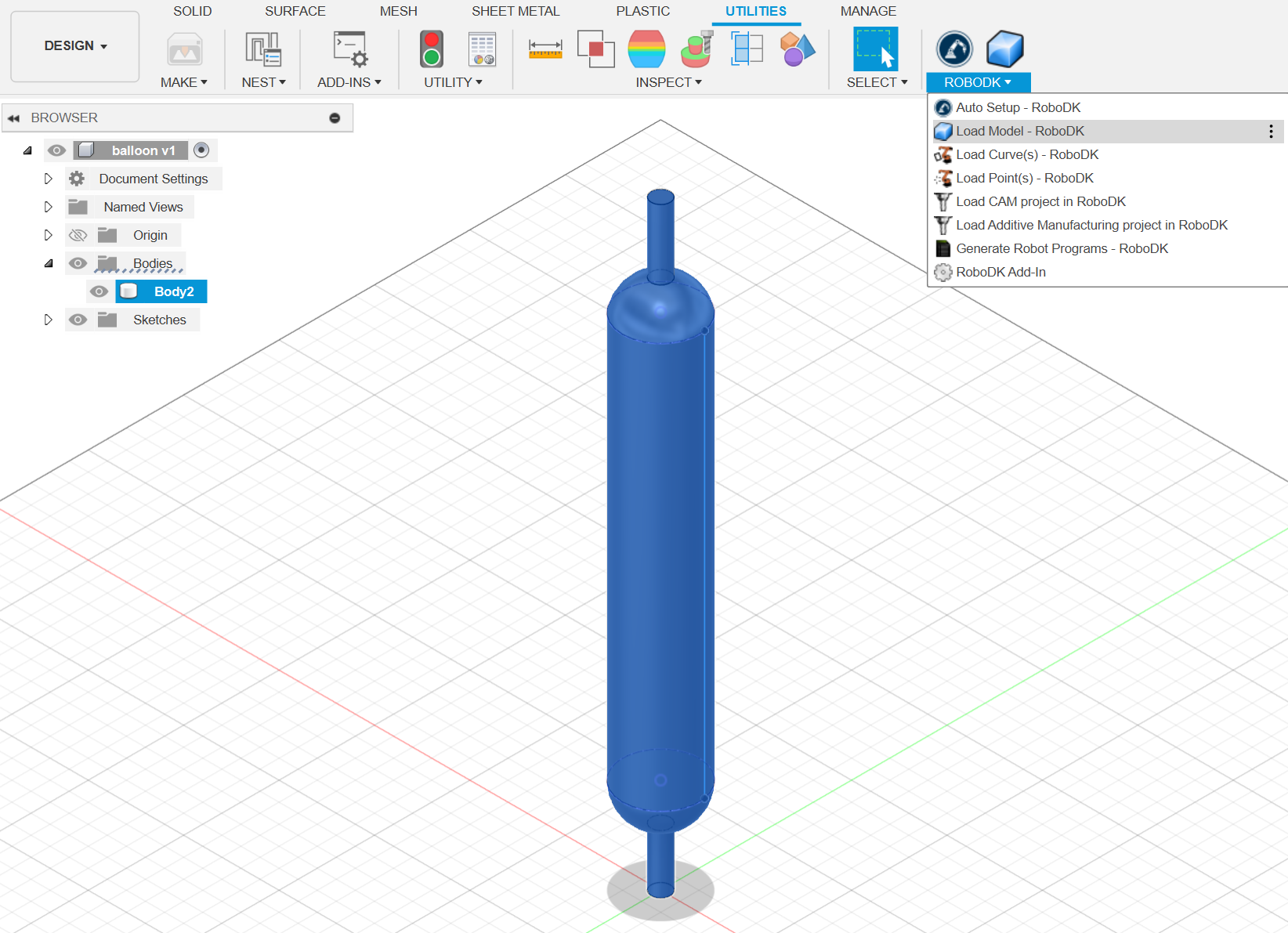
3.탱크모델위치를확인하고이름을변경합니다.
경로 가져오기
모델을임포트한후에는용접경로를임포트해야합니다.
Fusion 360에서경로를가져옵니다:
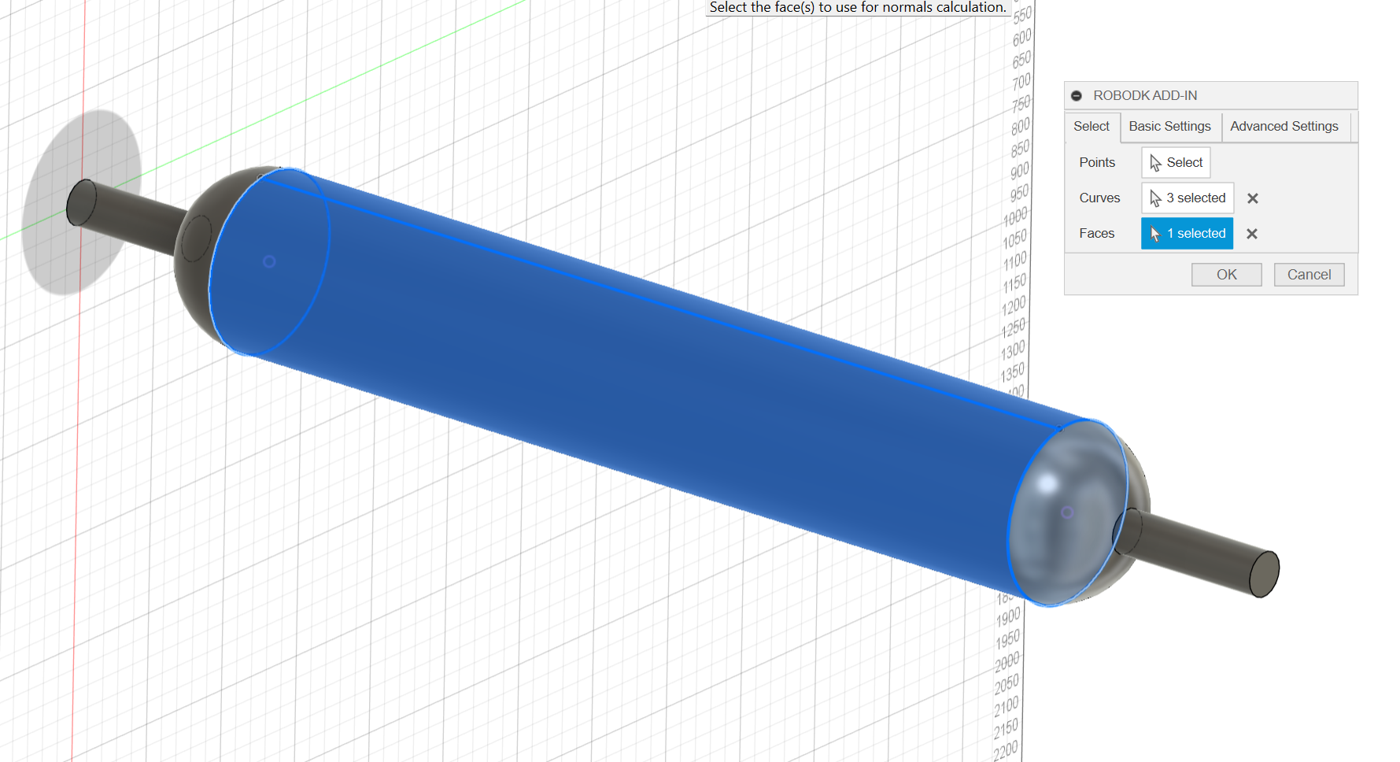
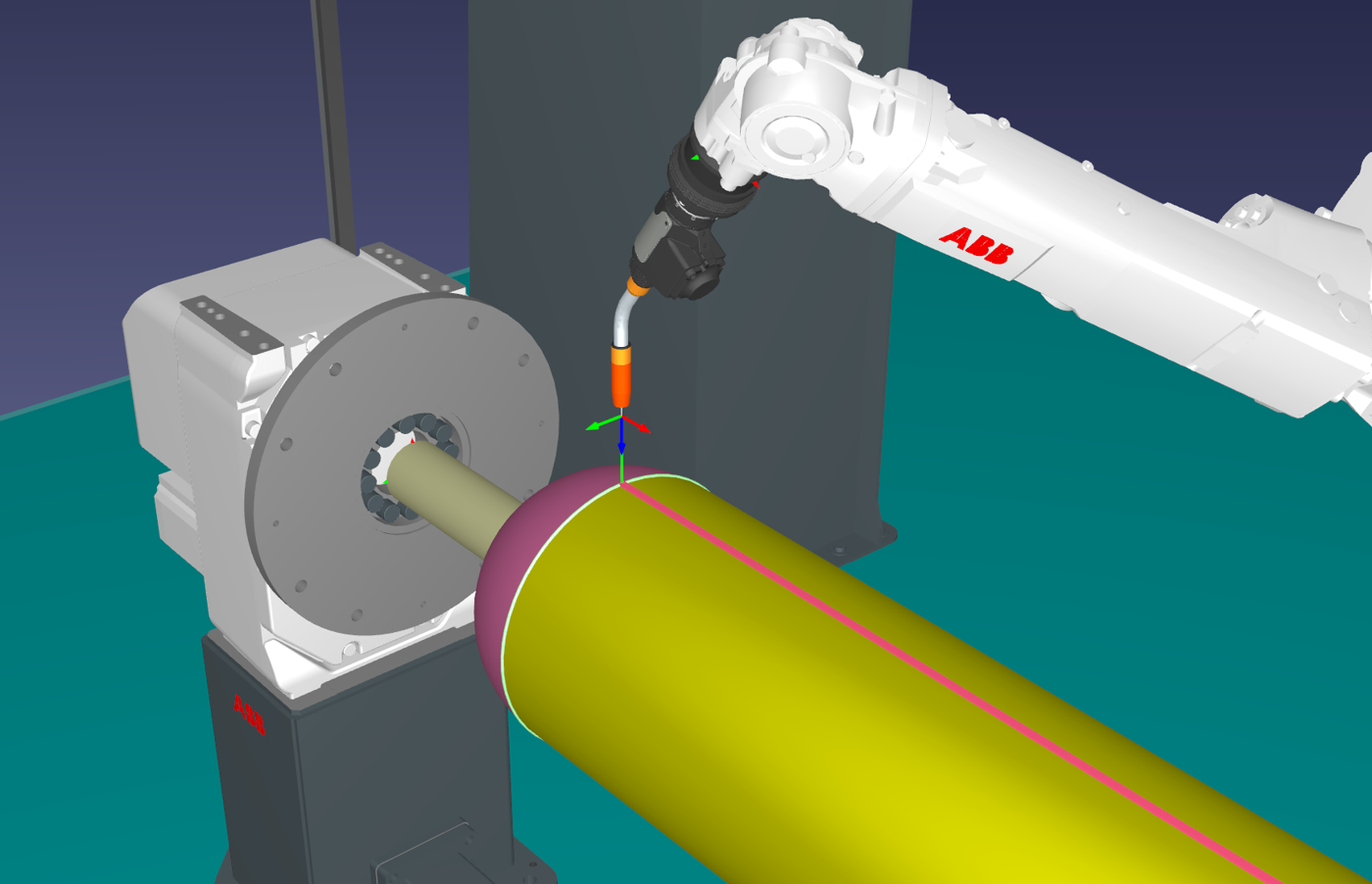
1.용접경로를선택합니다. 로봇도구의방향을잡는데도움이되는면도선택해야합니다.
2.이제Fusion 360에서경로를가져왔으므로 RoboDK로이동할수있습니다.
3.경로위치를확인하고이름을변경합니다.
커브 팔로우 프로젝트 설정
모델과용접경로를임포트한후다음단계는해당커브팔로우프로젝트를생성하는것입니다.
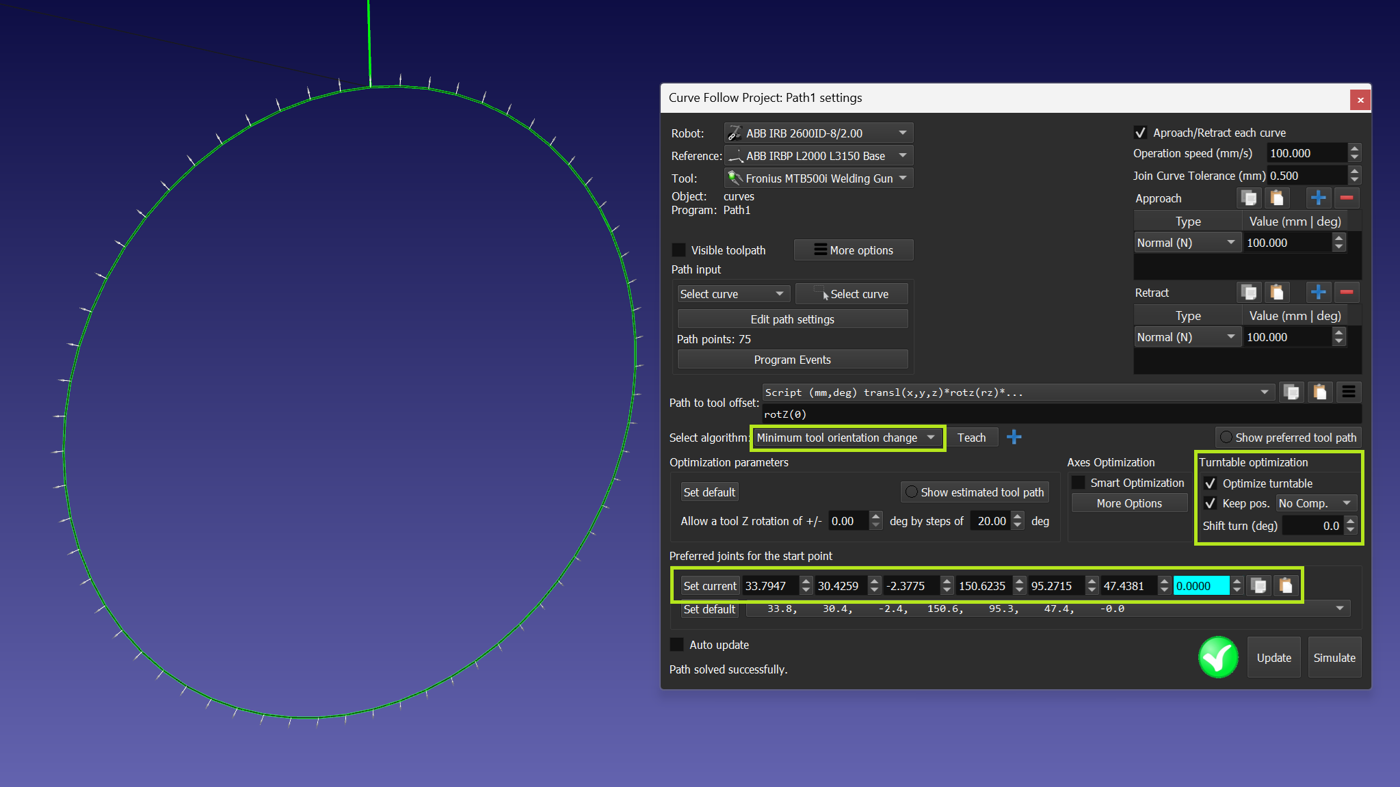
1.새커브 팔로우 프로젝트를 만듭니다(유틸리티->커브팔로우프로젝트).
2.첫번째원형커브를선택합니다.
3.보정없이고정 TCP 위치를사용합니다.
4.TCP 시작지점과방향을명시적으로설정합니다.
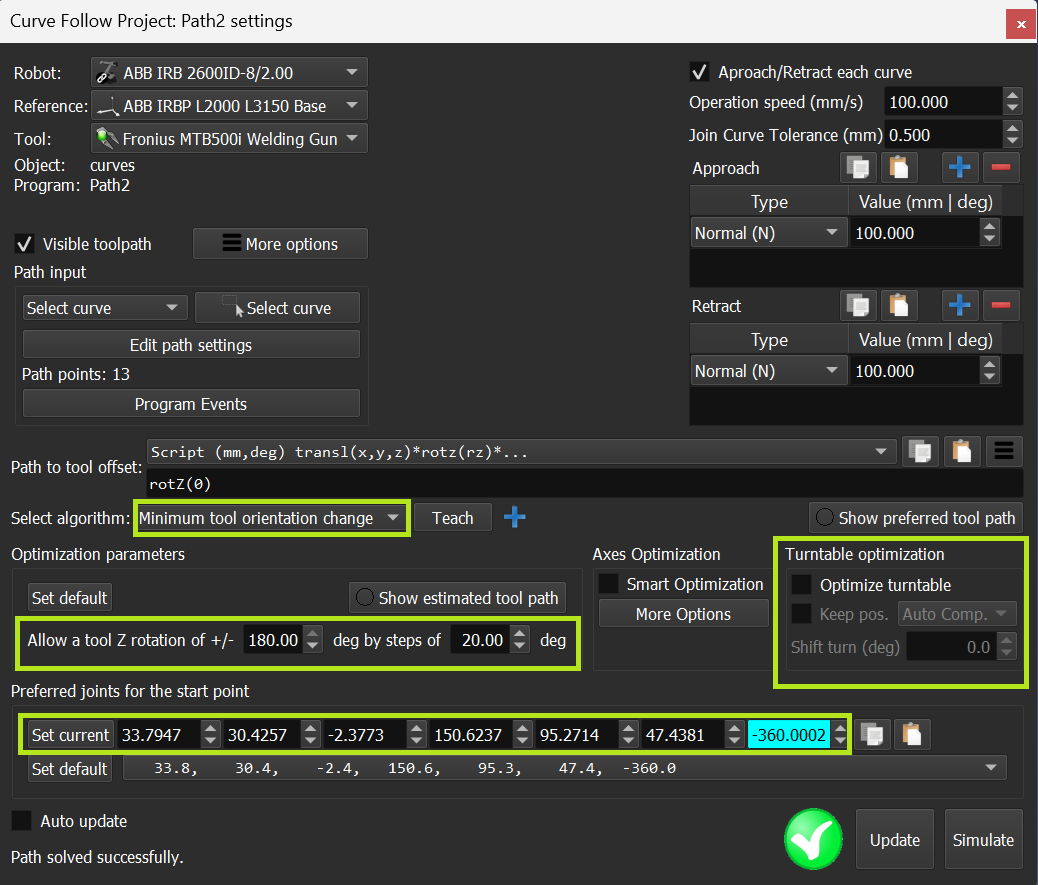
5.직선이음새를위한새커브 팔로우 프로젝트(유틸리티->커브팔로우프로젝트)를만듭니다.
6.포지셔너회전사용을배제하고이전궤적의끝점을새궤적의시작으로명시적으로설정합니다.
7.두번째원형심에대한궤적을만들고첫번째심과동일한설정을사용합니다.
용접 Add-in 사용법
이섹션에서는용접 Add-in을적용하고각용접작업을사용자지정하는방법을배웁니다. ABB 로봇의용접지침에템플릿을사용할것입니다.
1.용접Add-in을시작하고사용할필요한용접모드를순차적으로추가합니다.
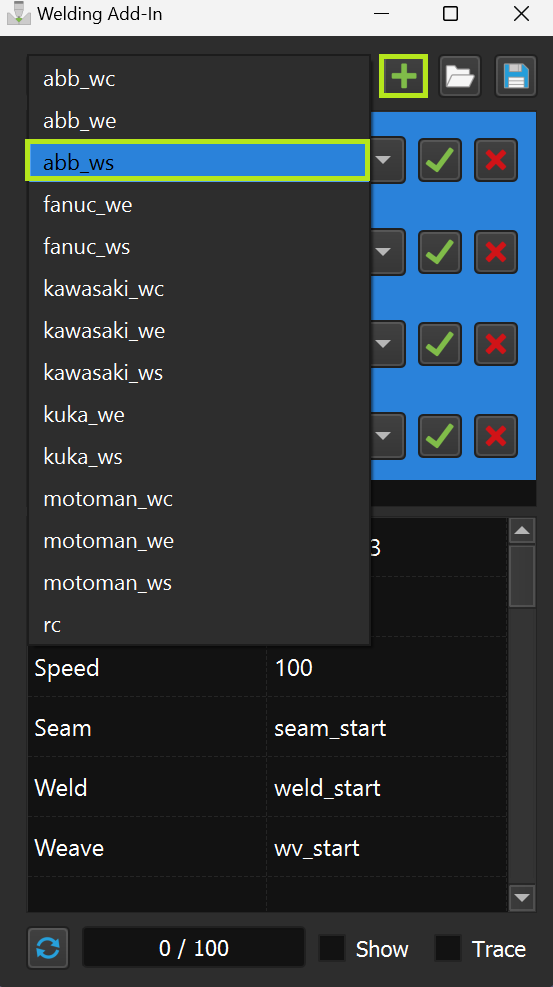
2.모드의이름을다르게변경하고매개변수를설정합니다
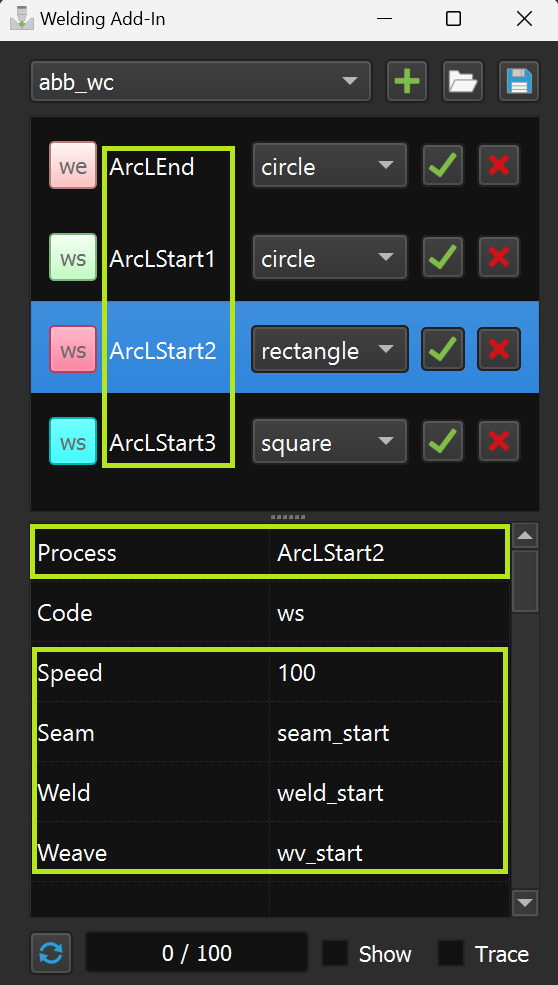
3.각커브팔로우프로젝트에서용접시작및용접종료에대한지침을선택하고적용합니다(Ctrl 버튼사용).
아래스크린샷의선택순서에유의하세요.
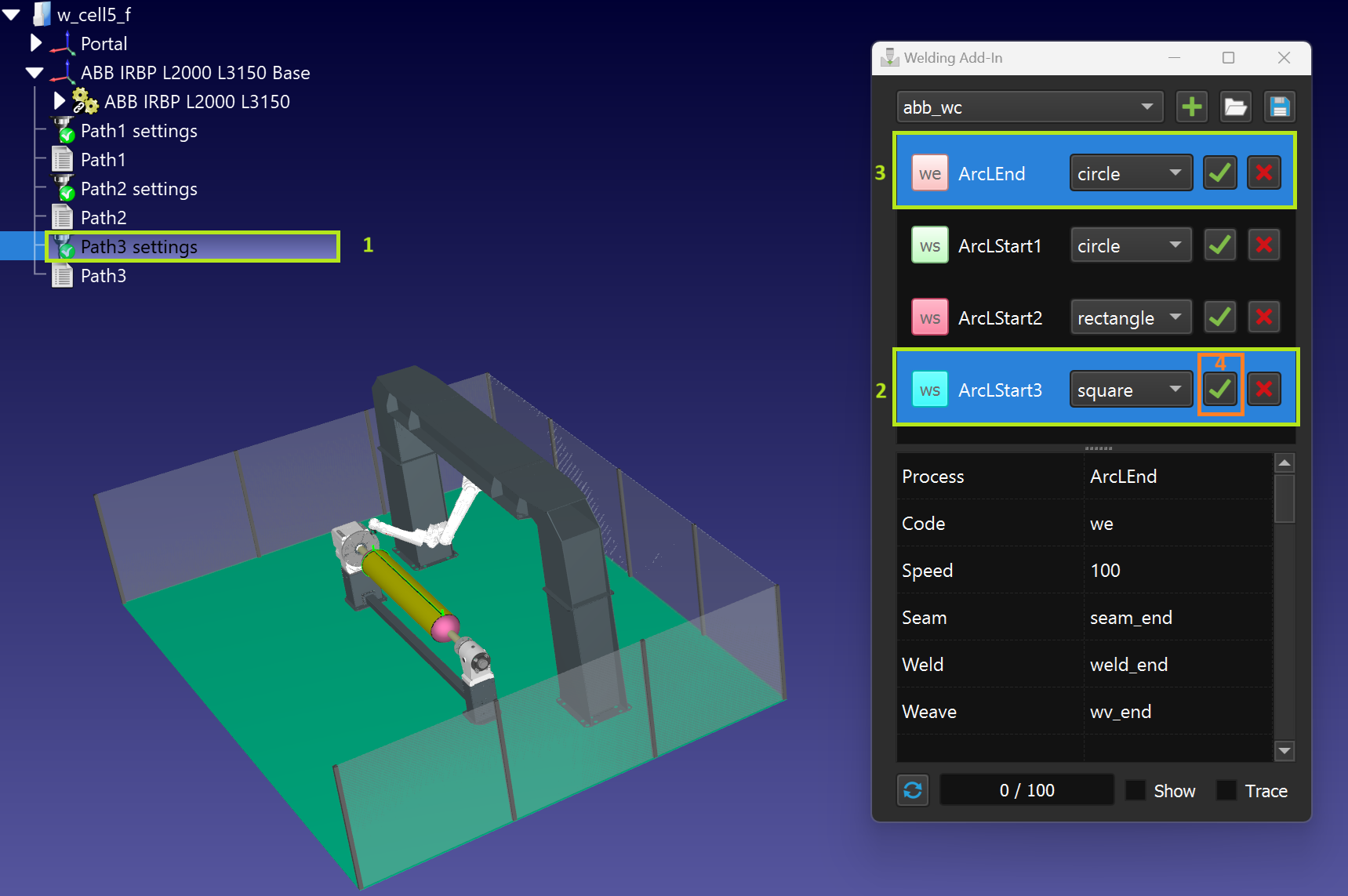
4.적절한커브 팔로우 프로젝트를 선택하고키보드단축키Ctrl + U를 눌러업데이트합니다.
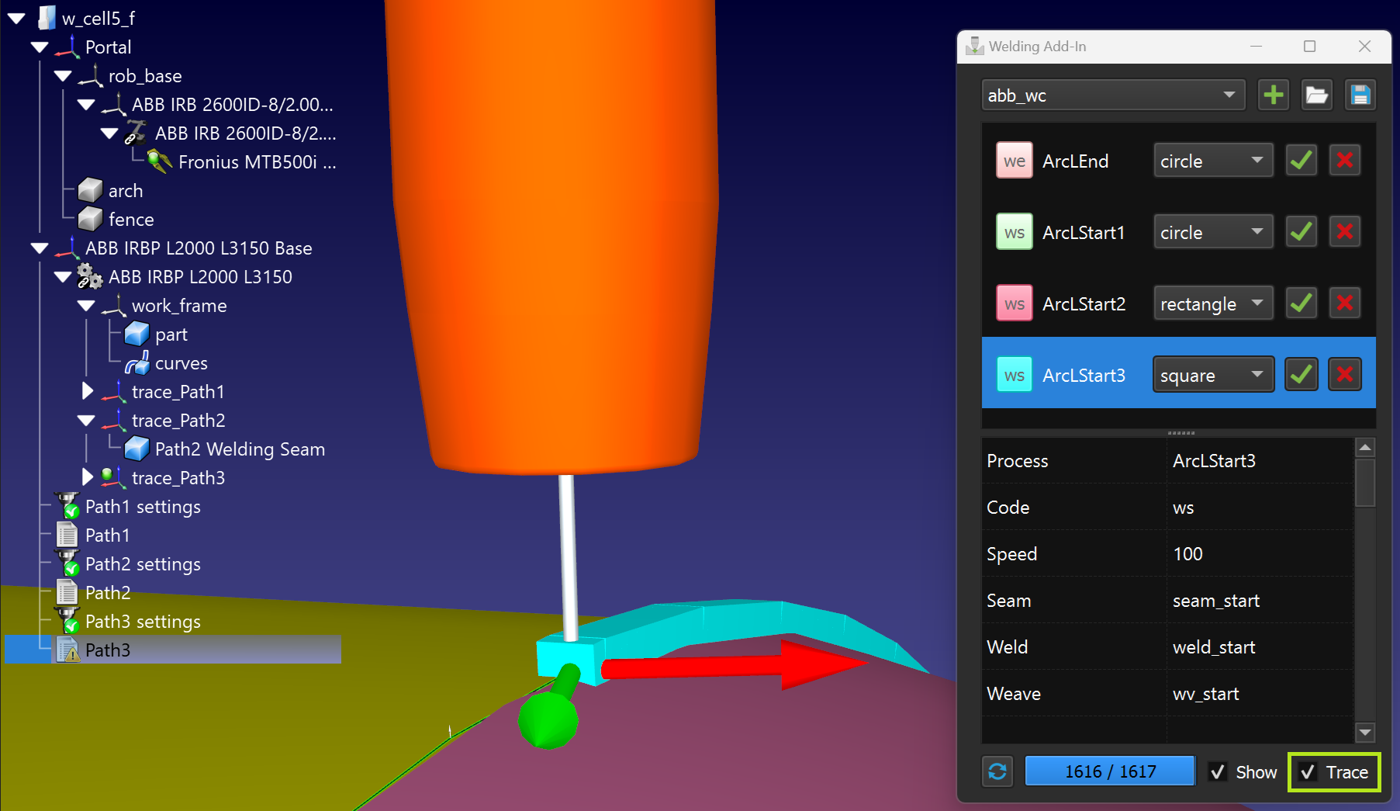
5.용접궤적에대한시각화를만들수있습니다.
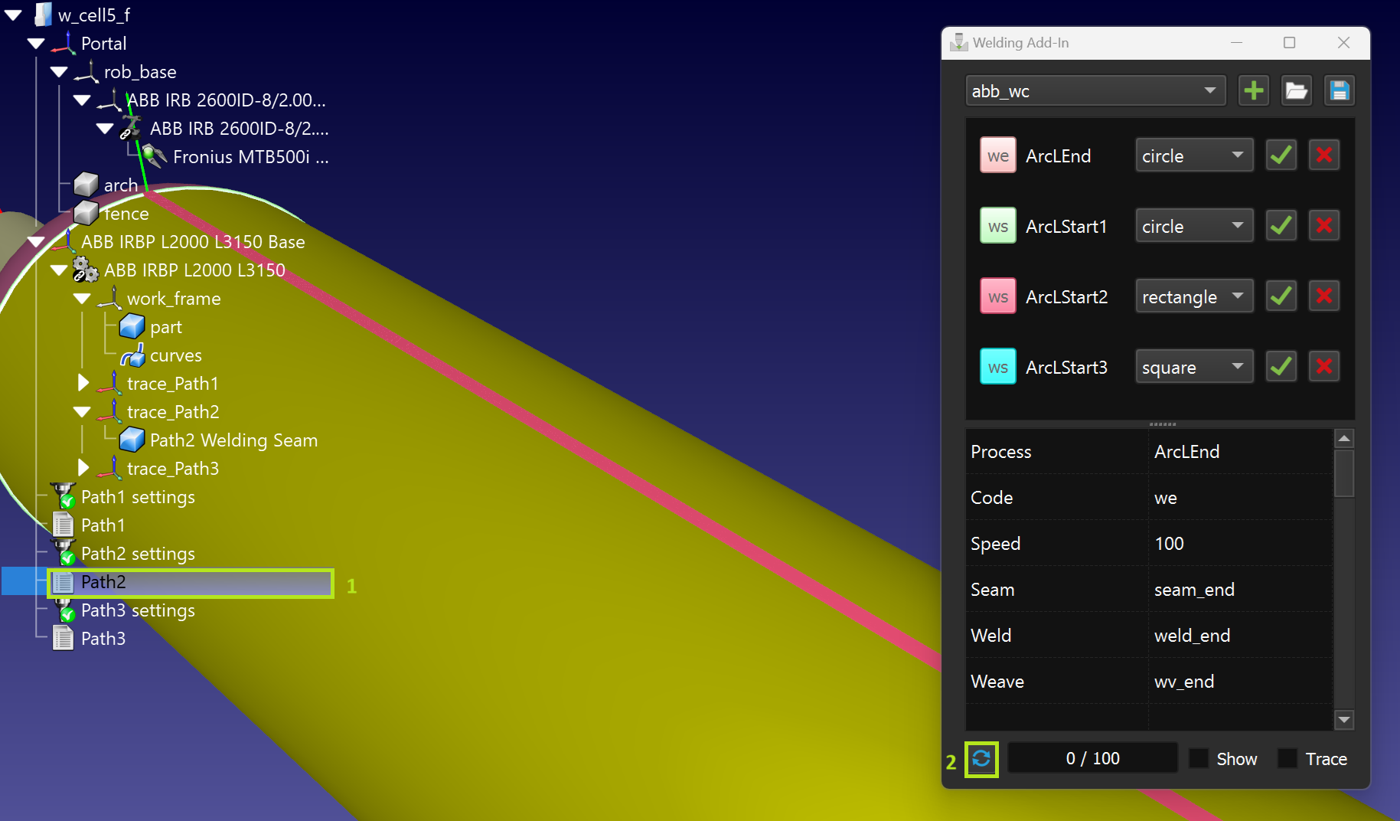
6.추적확인란을사용하여프로그램이실행될때용접재료가어떻게적용되는지평가합니다.
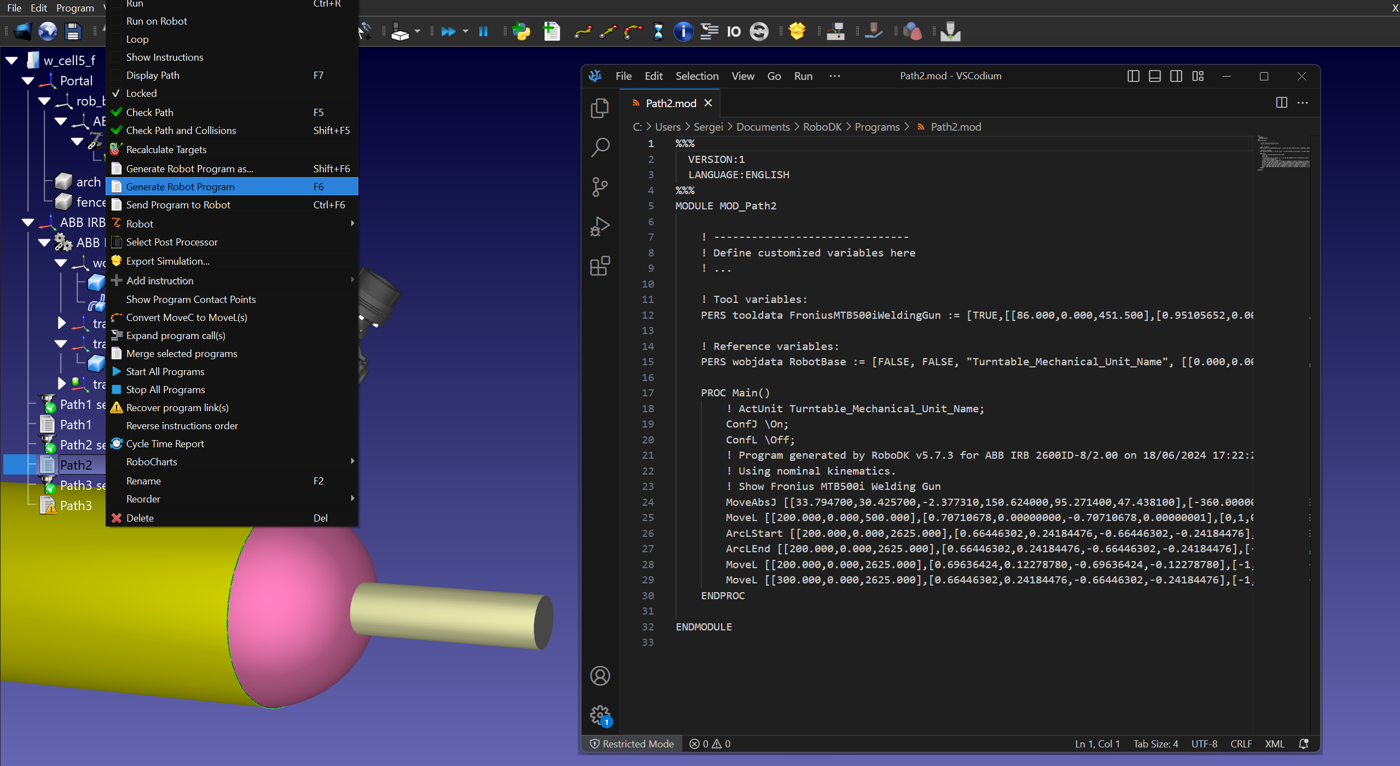
프로그램 생성
적합한포스트프로세서를선택하고용접명령어로생성된프로그램을확인합니다: