외부
하나이상의축이로봇과동기화될경우로봇 가공프로젝트를최적화하는추가옵션을볼수있습니다. 축최적화섹션에서추가옵션을선택하여외부축최적화옵션을활성화할수있습니다.
다음기준에따라다양한설정과가중치를제공할수있습니다.
●기준조인트유지: 일부또는모든조인트에원하는축위치를적용할수있습니다. 가중치가높으면프로그램도중언제든지기준값과일치할가능성이더크다는것을의미합니다.
●동작최소화(이전위치와일치): 특정축을갑자기움직이면 "페널티"를부과할수있습니다.
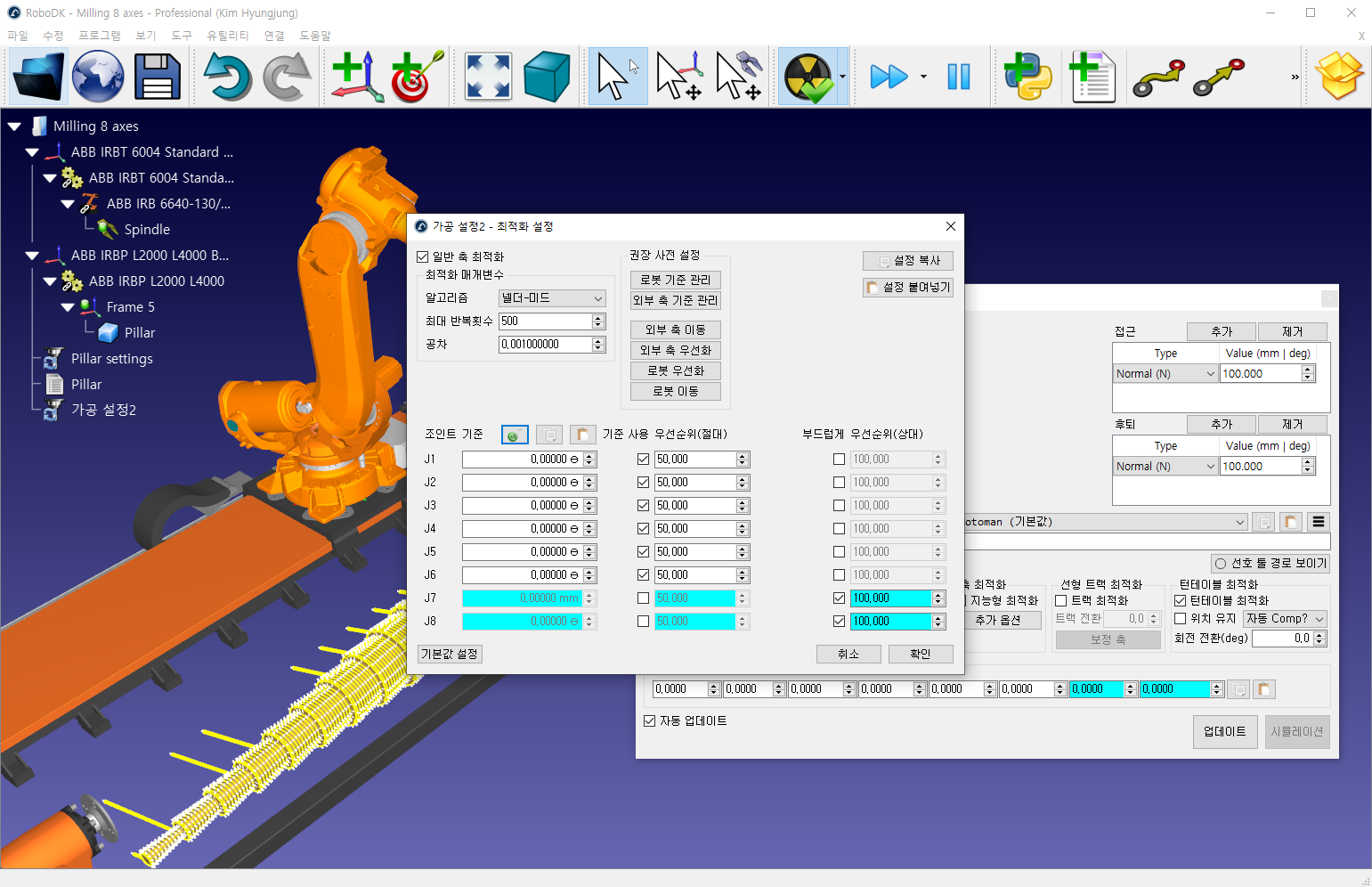
예를들어, 로봇기준사전설정유지관리를선택하면로봇축의현재위치와일치하도록위치참조가업데이트되는것을볼수있습니다. 로봇조인트의무게가일정(100)인반면외부축은무게(기본설정없음)가없는것을볼수있습니다. 반면외부축은급작스러운동작이나원치않는동작을하지못하도록작은무게(5)를갖게됩니다.
로봇가공프로젝트를업데이트한후이러한설정을변경하여원하는효과를얻을수있습니다.