앞절에서설명한기준 좌표계 정의 유틸리티는로봇과관련하여턴테이블의위치를보정하는두가지방법을제공합니다. 턴테이블의보정/식별은올바르게정의된툴또는측정시스템(레이저측정기등)을사용하여수행할수있습니다.
턴테이블축을움직이면서턴테이블의 1점위치를여러번수집해야합니다. 현재 1축과 2축턴테이블교정을지원합니다.
중요: 외부측정시스템에서측정한포인트를사용하지않는경우기준좌표계를식별하기전에올바르게
TCP를 정의하십시오. 이는기준좌표계가로봇운동학을사용하여식별되기때문에중요합니다. 또한이것은로봇티치펜던트에서포인트를가져오는경우에도적용됩니다. 툴보정(TCP)에발생하는모든오류는턴테이블위치확인으로전달됩니다.
1축턴테이블을보정하려면다음절차를따르십시오.
1.유틸리티 ➔  기준 좌표계 설정을선택하십시오.
기준 좌표계 설정을선택하십시오.
2.정의/ 보정할기준좌표계를선택하십시오.
또는기준좌표계를마우스우측버튼으로클릭하고 기준 좌표계 정의를선택하십시오.
기준 좌표계 정의를선택하십시오.
3.1축 턴테이블 보정방법을선택하십시오.
4.조인트를사용하여보정을선택하십시오(기본설정). 로봇베이스프레임과관련하여각포인트의 XYZ 위치가있는경우지점으로변경할수있습니다.
5.스테이션에하나이상의로봇을사용할수있는경우로봇을지정하십시오.
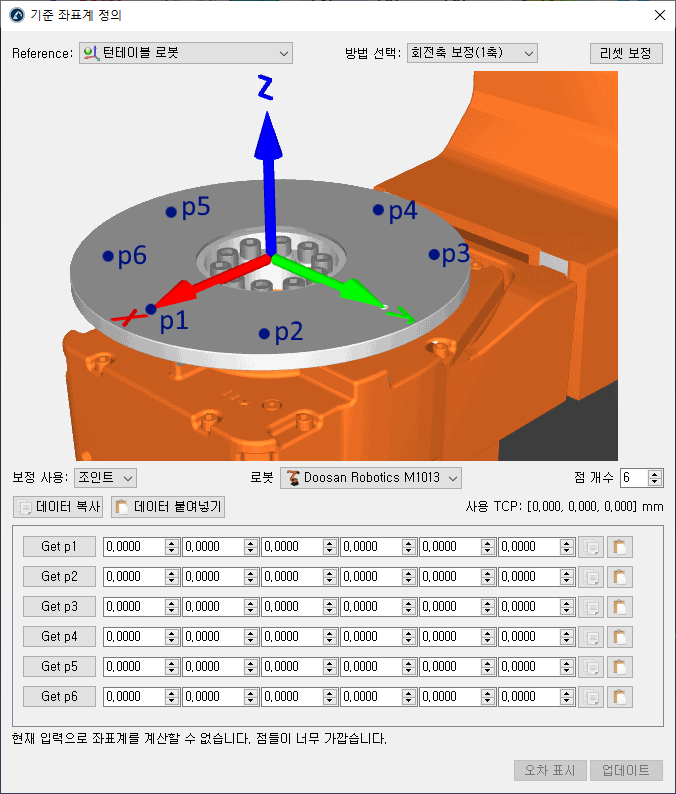
6.활용할포인트수를선택하십시오(최소 3개).
중요: 턴테이블의같은지점을로봇과함께측정해야합니다. 앞그림에서보듯이턴테이블은(+) 회전방향으로움직여야합니다. 턴테이블이동과관련된오류를보다잘이해하기위해서는최소 6~10점을사용하는것이좋습니다.
중요: 첫번째점은턴테이블의 X축을정의합니다(정적좌표계).
중요: 보정된기준좌표계의 XY 평면은호/원형으로설명된평면과일치합니다. 만약해당평면에서포인트를취하지않았다면간격을조정할필요가있습니다. 예를들어, 턴테이블의루트를나타내기위해보정된좌표계프레임에중첩된새기준좌표계를추가할수있습니다.
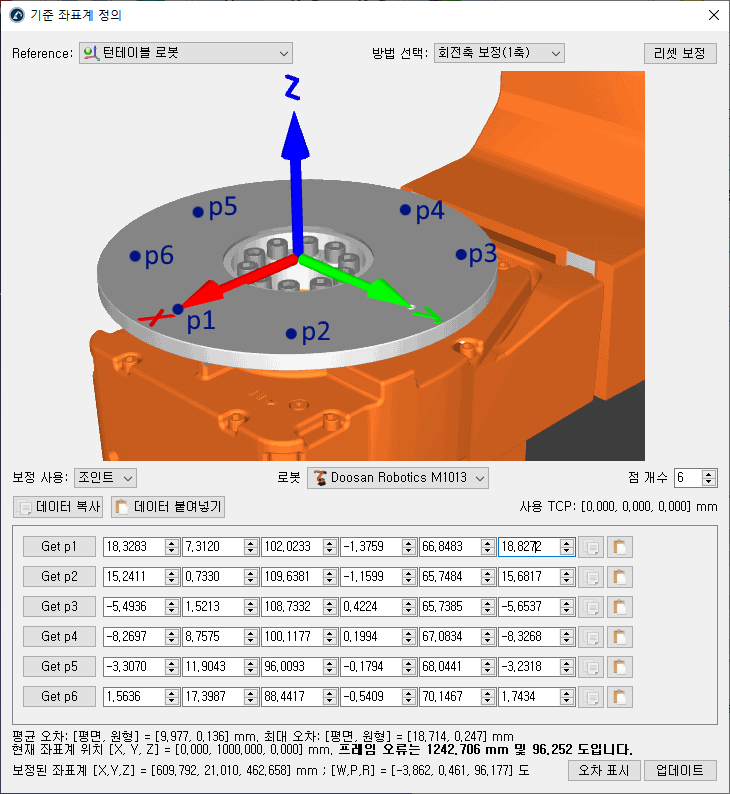
7.로봇조인트위치(또는포인트)로표를입력하십시오.
팁: 구성목록은수동으로채우거나복사/붙여넣기버튼(연결값오른쪽에있는버튼)을사용하여입력할수있습니다.
팁: 로봇에연결된경우 "p 찾기" 버튼을선택하여로봇에서직접로봇조인트를검색할수있습니다. 자세한설정정보는
로봇 드라이버섹션에서확인할수있습니다. 이옵션은일부로봇에는사용할수없으며로봇제조업체에서판매하는추가소프트웨어옵션이필요할수있습니다.
중요: 값을수동으로입력하는경우각조인트값을최소 4개이상제공하는것이좋습니다. 허용된 10진수값은도구➔옵션➔정확도➔조인트최대자릿수에서변경할수있습니다.
참고: 업데이트를선택하면 RDK 스테이션에제공된데이터의복사본을 RDK 스테이션에저장할것입니다.
8.마지막으로업데이트를선택하여 RoboDK 스테이션에서선택한기준좌표계에새위치를적용하십시오.
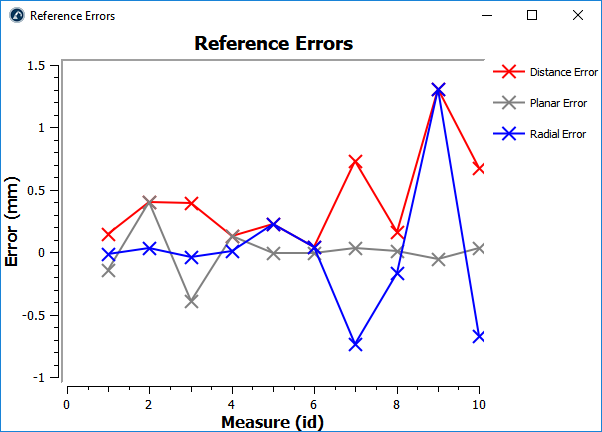
9.오류표시를선택하여각점의오류수준을표시하십시오. 거리오류는평면오류및반경오류조합과같습니다.

2축턴테이블을보정하려면다음절차를따르십시오.
1.유틸리티 ➔ 기준 좌표계 설정을선택하십시오.
2.정의/ 보정할기준좌표계를선택하십시오.
또는기준좌표계를마우스우측버튼으로클릭하고기준 좌표계 정의를선택하십시오.
3.2축 턴테이블 보정방법을선택하십시오.
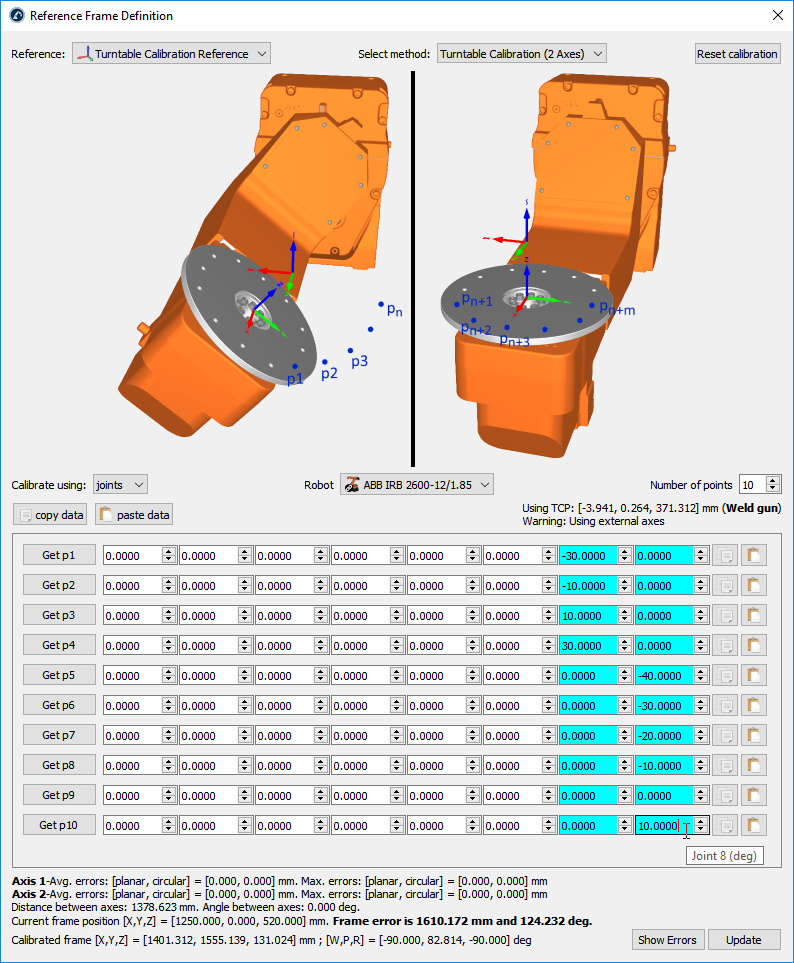
4.조인트를사용하여보정을선택하십시오(기본설정). 로봇베이스프레임과관련하여각포인트의 XYZ 위치가있는경우지점으로변경할수있습니다.
5.스테이션에하나이상의로봇을사용할수있는경우로봇을지정하십시오.
6.활용할포인트수를선택하십시오(최소6개, 각축당3개).
중요: 턴테이블의같은지점을로봇과함께측정해야합니다. 턴테이블은(+) 회전방향으로움직여야합니다. 이전그림과같이먼저축1을이동한다음축2를이동하십시오. 턴테이블이동과관련된오류를보다잘이해하기위해서는최소12~20점을사용하는것이좋습니다.
참고: 축 1을식별하는데사용되는점의수는축 2를식별하는데사용되는점의수와일치할필요는없습니다. 예를들어, 축 1에4점, 축 2에6점을사용할수있습니다.
중요: 보정된기준의 Z축은축 2와일치합니다. 보정된기준의 X축은일반적기준과일치합니다. 또한, 보정된기준의원점은축 2와일반적기준(축 1에가장가까운축 2의지점) 사이의교차점에배치됩니다.
7.로봇조인트위치(또는포인트)로표를입력하십시오.
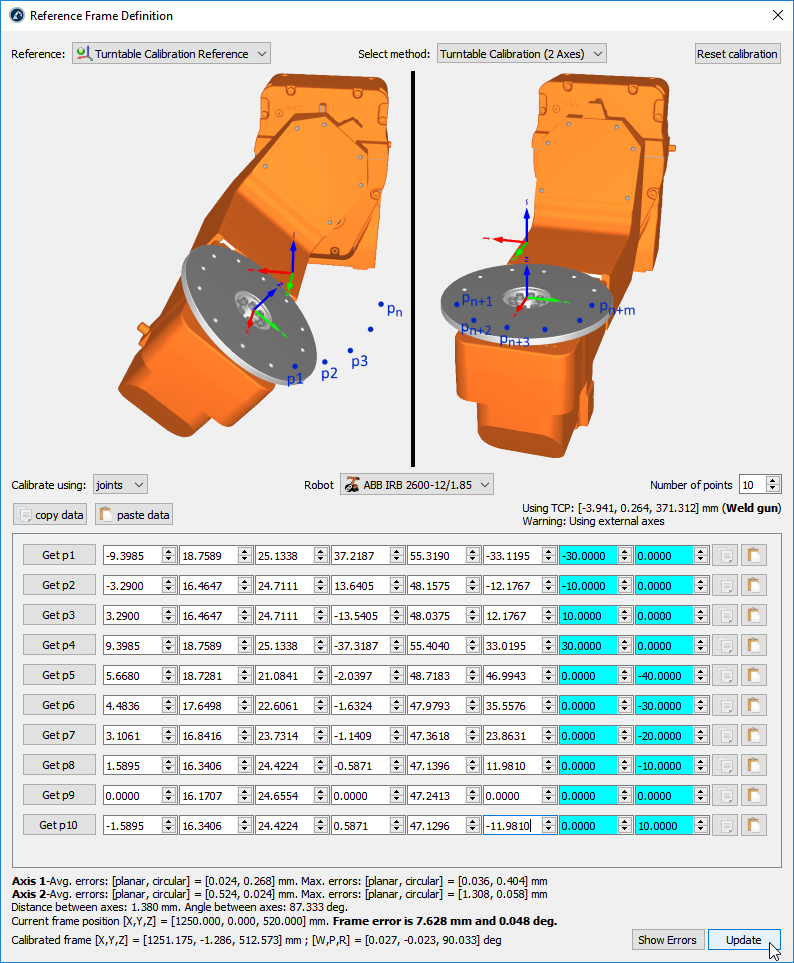
팁: 구성목록은수동으로채우거나복사/붙여넣기버튼(연결값오른쪽에있는버튼)을사용하여입력할수있습니다.
팁: 로봇에연결된경우 "p 찾기" 버튼을선택하여로봇에서직접로봇조인트를검색할수있습니다. 자세한설정정보는
로봇 드라이버섹션에서확인할수있습니다. 이옵션은일부로봇에는사용할수없으며로봇제조업체에서판매하는추가소프트웨어옵션이필요할수있습니다.
중요: 값을수동으로입력하는경우각조인트값을최소 4개이상제공하는것이좋습니다. 허용된 10진수값은도구➔옵션➔정확도➔조인트최대자릿수에서변경할수있습니다.
참고: 업데이트를선택하면 RDK 스테이션에제공된데이터의복사본을 RDK 스테이션에저장할것입니다.
8.마지막으로업데이트를선택하여 RoboDK 스테이션에서선택한기준좌표계에새위치를적용하십시오.
9.오류표시를선택하여각점의오류수준을표시하십시오. 거리오류는평면오류및반경오류조합과같습니다.