1
다음단계에따라 1축턴테이블을모델링하십시오.
1.프로그램 ➔ 기준 좌표계 추가를선택하십시오.
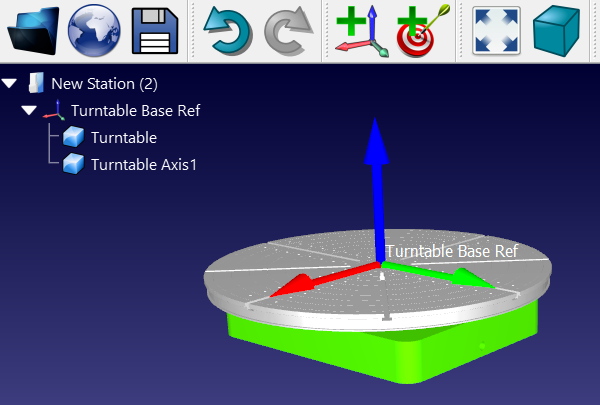
2.기준좌표계를선택하고 F2를선택하여Turntable Base Ref로이름을변경하십시오.
3.턴테이블의 3D 모델을불러오십시오. 3D 모델을 RoboDK 창(STL, STEP 또는 IGES 파일등)으로드래그앤드롭하십시오.
중요: 턴테이블의각이동부분은 RoboDK에서별도의객체이어야합니다. 개체를마우스우측버튼으로누르고분할을선택하여개체를하위개체로나눌수있습니다. 여러개체를선택하고병합을선택하여다시그룹화할수도있습니다.
중요: 턴테이블생성을간소화하려면 Z축(파란색축)을따라정렬된기준좌표계가있어야합니다.
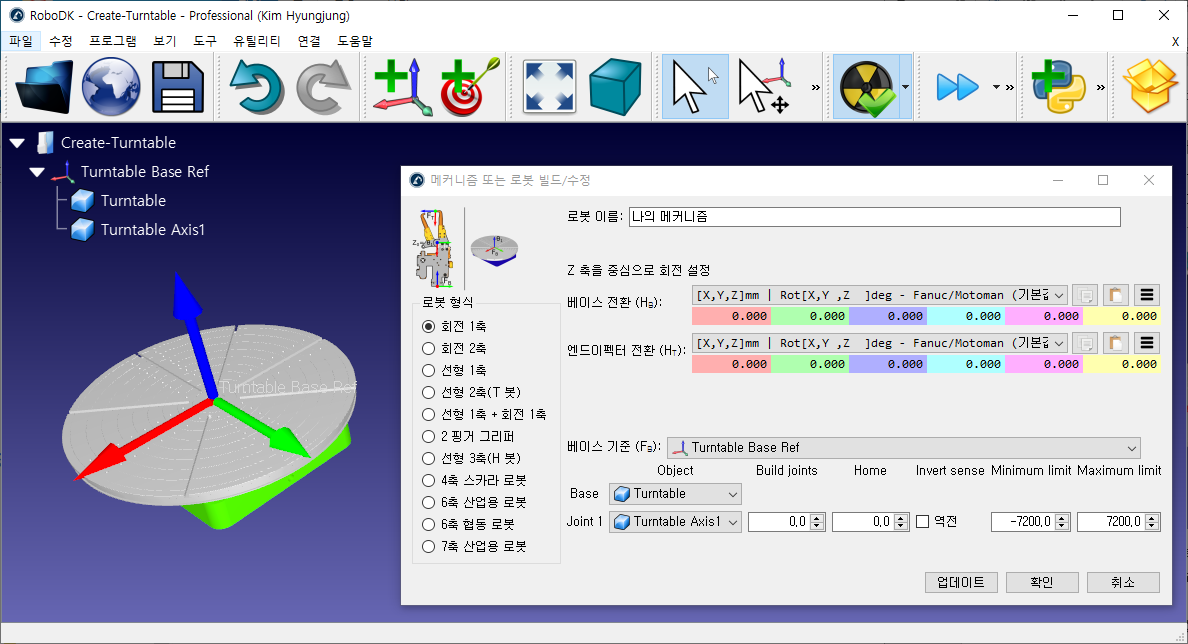
4.유틸리티 ➔ 모델 메커니즘 혹은 로봇을선택하십시오.
5.1개의회전축을선택하십시오.
6.기준좌표계와객체항목은자동으로채워져야합니다. 자동선택이올바르지않으면그에따라업데이트할수있습니다.
7.예를들어 +/-20회전을원하면 +/-7200도를입력할수있습니다. 차후로봇패널의조인트한계라벨을두번클릭하여조인트한계를변경할수도있습니다.
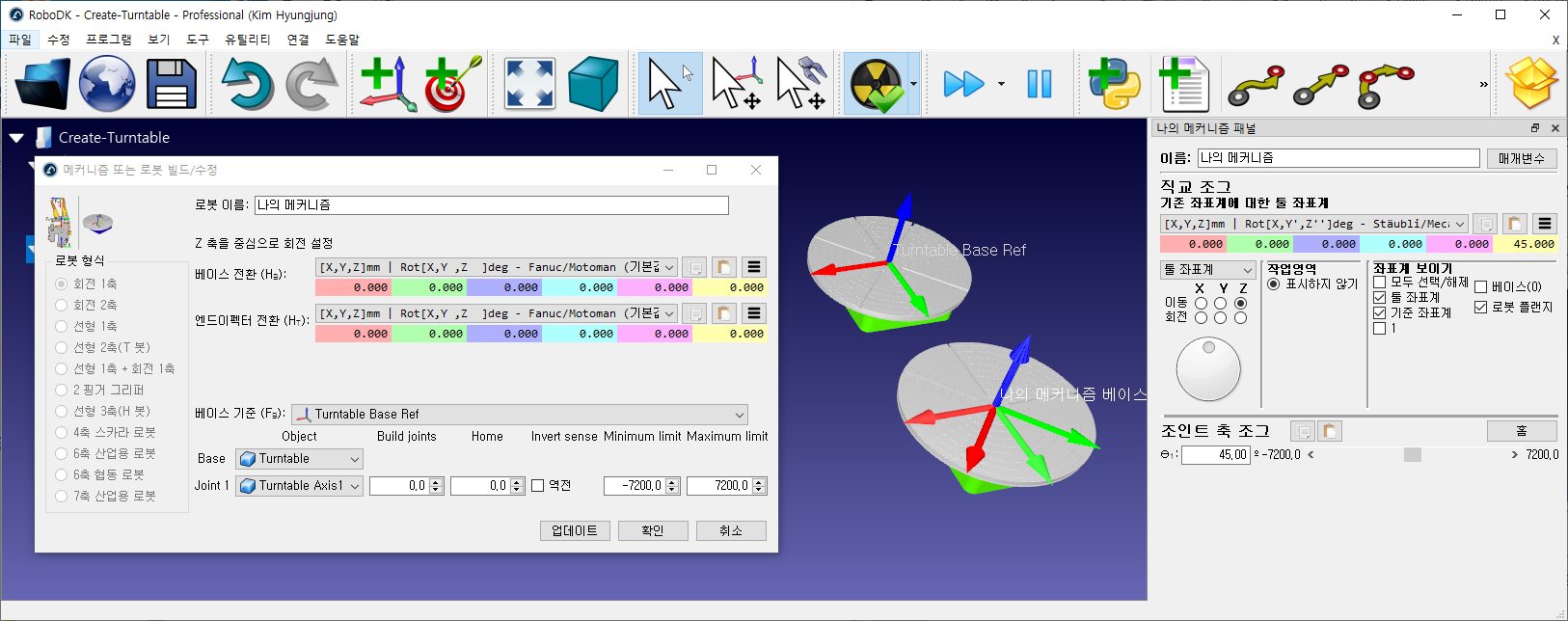
8.새메커니즘이나타날메커니즘을생성하려면업데이트를선택하십시오.
9.확인을선택하여메뉴를닫거나필요한경우턴테이블에변경사항을추가할수있습니다.
10.메커니즘을만들때사용한원본객체파일을삭제할수있습니다. 이메커니즘은 RDK 프로젝트와함께저장되며외부의존성이필요하지않습니다.
참고: 기준좌표계가기본좌표계(Fb)와일치하지않을때에는기준시프트(Hb)를입력하여변환해야할수도있습니다. 또한, 새기준좌표계를추가하고도구 ➔ 측정을이용하여좌표계를특정위치에배치할수있습니다.
팁: 1축 보정 절차에따라로봇을기준으로턴테이블을정확하게배치하십시오.