로봇
이절에서는공통기준좌표계를공유하면서둘이상의로봇을오프라인으로프로그래밍하는방법을설명합니다.
일반적인오프라인프로그래밍애플리케이션에서개체의위치는로봇과관련하여업데이트됩니다. 그러나같은용도에두개이상의로봇을사용할경우, 각로봇의위치는하나의공통좌표계(기준물체또는공통기준좌표계)에대해업데이트되어야합니다.
기준좌표계와관련하여둘이상의로봇위치를업데이트하려면다음단계를따르십시오.
1.로봇기준좌표계와객체기준좌표계가서로연동되어있지않은지확인하십시오. 종속성이있는경우기준좌표계를스테이션항목에부착해야합니다.
2.각로봇에대해새로운개별기준좌표계를정의하는것처럼로봇기본좌표계부착된새기준좌표계를추가합니다. 이기준좌표계는각로봇에관한부품의실제위치를나타냅니다.
3.이기준좌표계를각각보정해야합니다. 별도로표준좌표계 보정 절차(3-점방법예시)를사용하십시오.
이시점에서우리는우연히일치하는 3개의기준좌표계를보게되지만그렇게되면안됩니다. 이문제를해결하려면각로봇의기준좌표계를업데이트해야합니다.
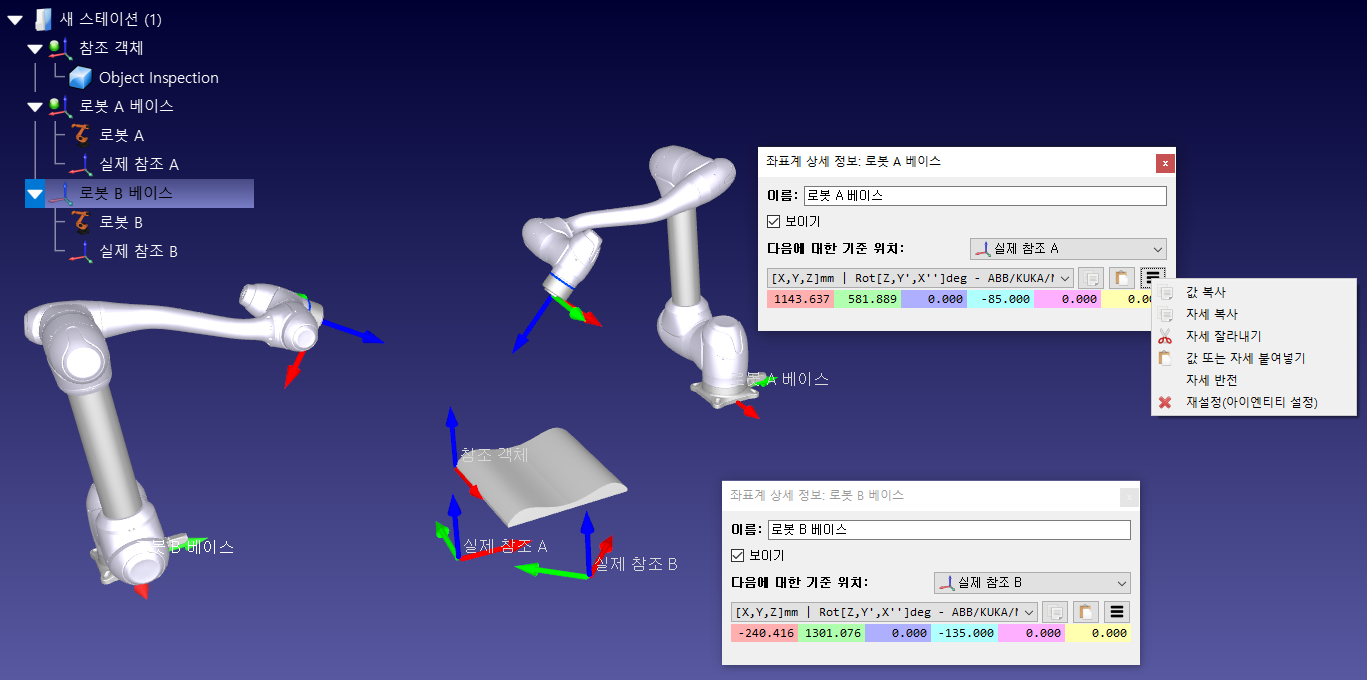
4.로봇 A 베이스와같은로봇좌표계중하나를더블클릭하여기준좌표계창을여십시오.
5.로봇의보정된좌표계기준과관련하여복사버튼선택하여로봇베이스참조위치를복사합니다.
6.같은창에서객체의 좌표계에 대한 참조 위치(드롭다운)를변경하십시오.
7.복사된위치를붙여넣으십시오. 로봇이이동하여참조개체좌표계와일치하게될것입니다.
8.다른로봇이있다면이절차의 4-7단계를반복하십시오.
이절차가끝나면모든기준좌표계가일치해야하며보정된모든좌표계와기준 개체사이의관계가동일해야합니다.