추가
로봇암을추가외부축과동기화할수있습니다. 외부축은단순히위치지정기준으로사용하거나같은로봇컨트롤러와동기화할수도있습니다. 외부축이동기화되면로봇과축이동시에움직이면서프로그래밍이된경로를기준으로정확한선형이동을유지할수있습니다. 모든로봇제어기가로봇암과외부축의동기화를지원하는것은아닙니다.
RoboDK를사용하여최대 6개의추가축을모든로봇과동기화할수있습니다. 만약당신이 6축로봇을사용하고있다면, 이것은당신이 12축의결합시스템을가질수있다는것을의미합니다.
로봇암을외부축과동기화하려면,
1.라이브러리에서추가축을불러오거나새로운 메커니즘으로 모델링모델링하십시오.
2.로봇과축/메커니즘을자신의위치에배치하는RoboDK 스테이션을구축하십시오.
참고: 선형트랙(레일)을사용하는경우, 다음그림과같이로봇중첩(첨부)을트리의레일에배치하십시오.
팁: 필요한경우추가참조좌표계를사용하여서로관련된개체를이동하십시오.
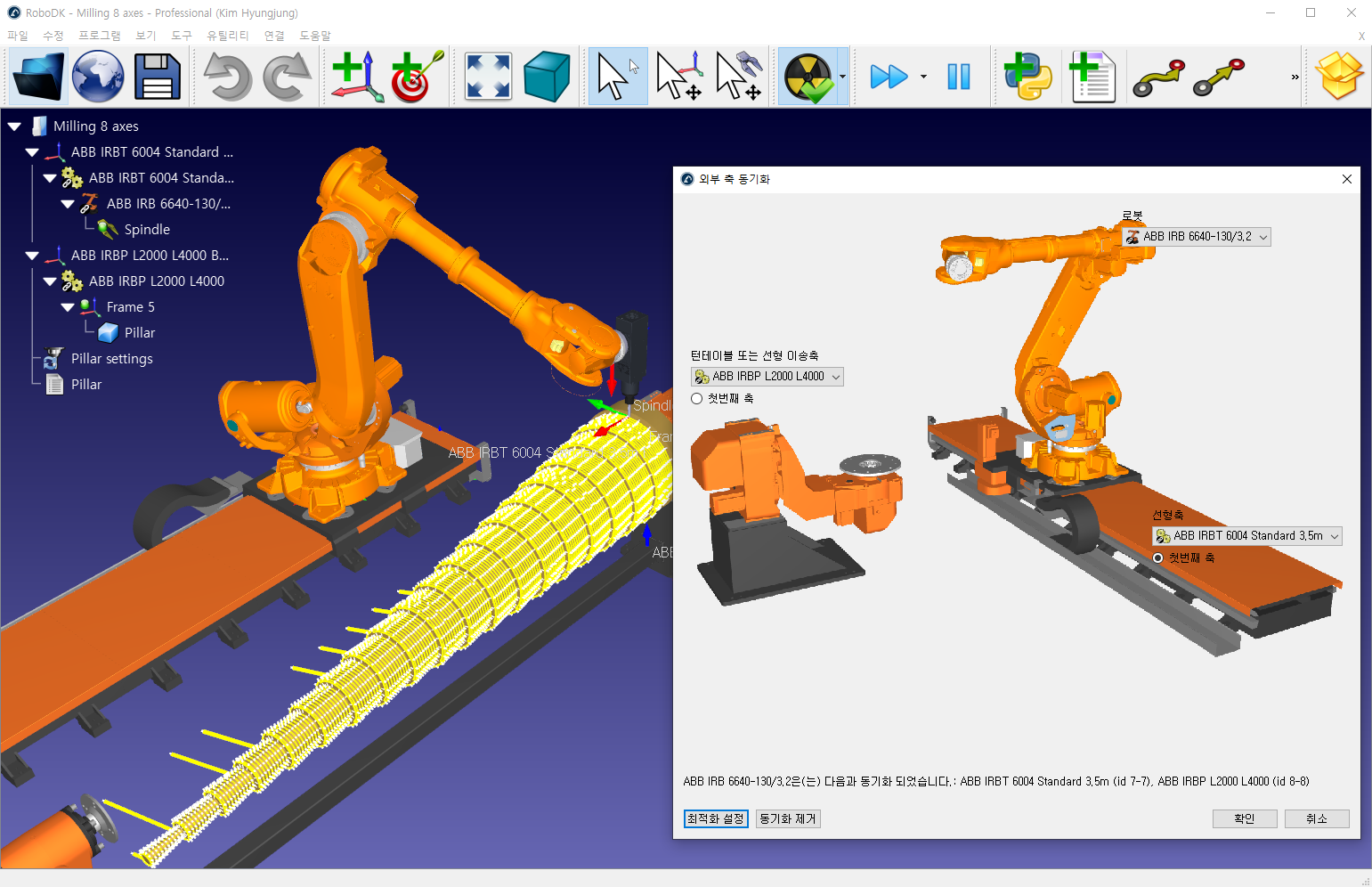
3.유틸리티➔ 외부 축 동기화를선택하십시오.
4.로봇을선택하면로봇과동기화할수있는턴테이블및/ 또는선형트랙을사용할수있습니다.
5.OK를선택하십시오. 새로봇패널이열리고추가축이파란색으로표시될것입니다. 된다.
이동기화된로봇과관련된표적은파란색으로추가조인트값을표시합니다. 프로그램이생성될때포지셔너의선호위치를지정할수있습니다. 직교좌표계의목표물은경로를따라외부축을이동하는동안제공된직교좌표계위치를유지합니다.
로봇가공설정은외부축의원하는위치를제공하기위한추가옵션을보여줍니다. 또한, 포스트프로세서를통해내보낸각동작에는외부축의위치가포함됩니다.
팁: 로봇패널에서로봇축한계를두번클릭하여로봇조인트한계를업데이트하십시오.
팁: 라이브러리에서외부축을사용할수없는경우, 유틸리티 ➔ 모델 메커니즘 혹은 로봇메뉴에서추가축모델링이가능합니다.