접근
Home타겟에서Approach타겟으로이동하는프로그램을생성하려면다음단계를따르십시오.
1.메뉴에서프로그램 ➔ 
2.프로그램이름을ApproachMove로변경하십시오.
3.Home 타겟을선택하십시오.
4.프로그램➔ 
로봇에게어떤툴프레임과기준좌표계를사용하고있는지알려주는두가지지침이자동으로추가됩니다.
참고: 타겟을선택하지않으면로봇의같은위치에새타겟이생성됩니다.
5.Approach 타겟을선택하십시오.
6.프로그램 ➔
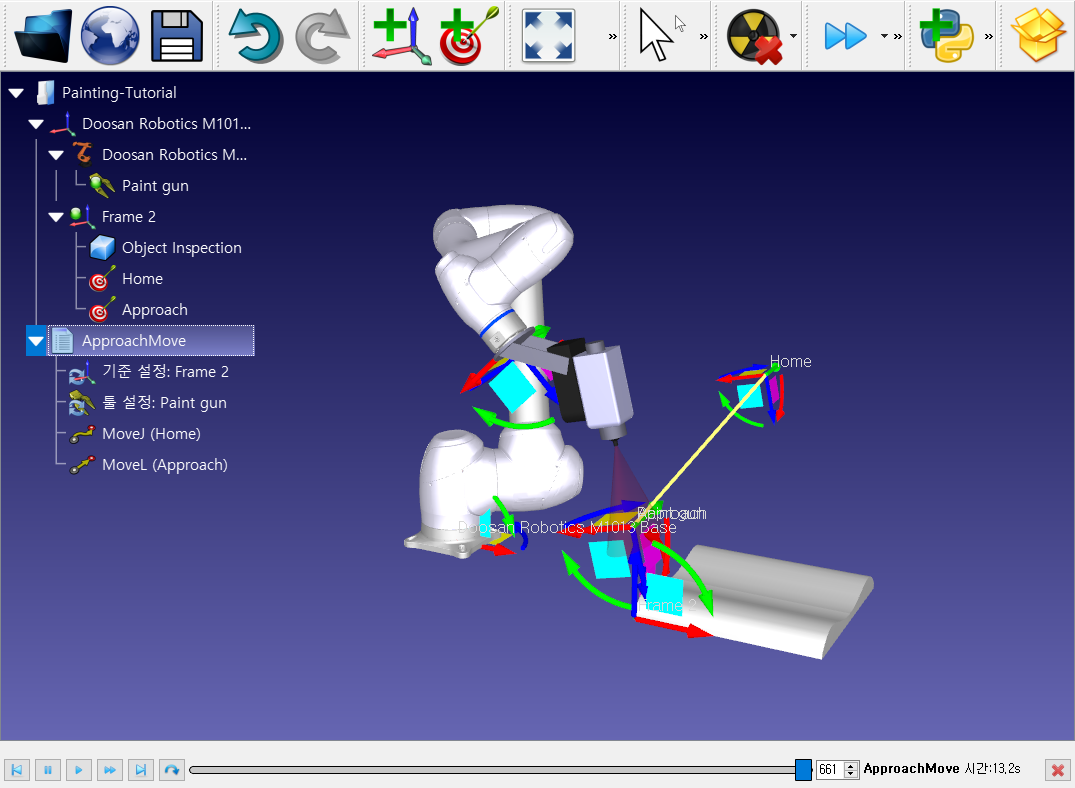
ApproachMove프로그램을두번클릭하면프로그램시뮬레이션이실행됩니다. 시뮬레이션바및예상사이클타임이표시될것입니다.