툴
로봇플랜지(기준좌표계)가 RoboDK에로드된경우툴의형상이로봇플랜지(기준좌표계)에대해올바르게정렬되지않을수있습니다. 다음단계에서는실수가발생하여공구가 Z 축주위에 180도장착된것으로가정하므로다음수정사항을적용해야합니다.
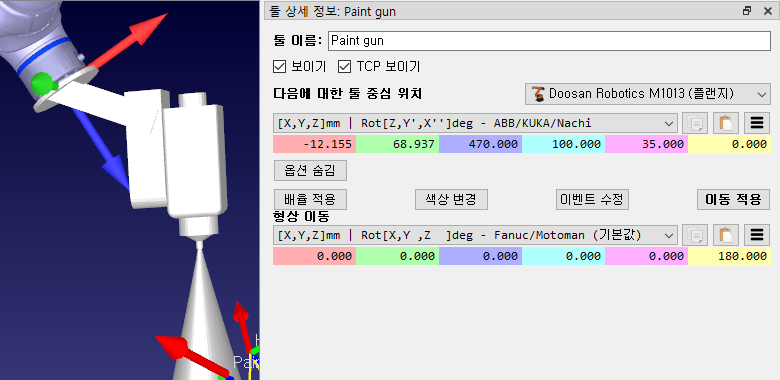
1.도구세부사항창에서추가옵션을선택하십시오.
2.다음그림과같이페인트건형상의노란색값(Z 회전)에 180을입력합니다. 마우스휠을각상자위에사용하여기본화면의위치를빠르게업데이트할수있습니다.
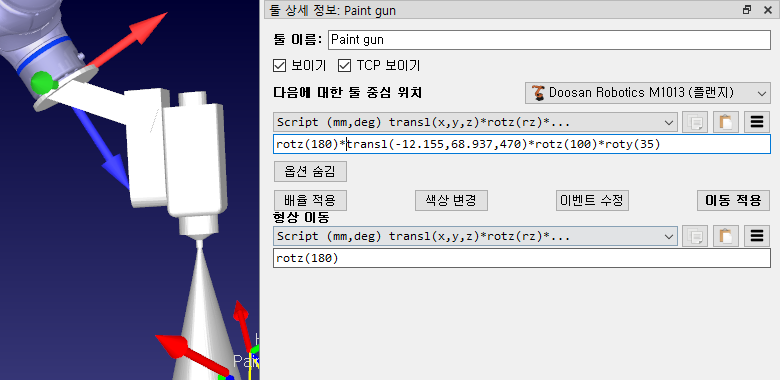
팁: 이작업전에 TCP가정의되었다면, TCP는더이상형상과일치하지않을것입니다. TCP의위치를올바른위치로업데이트하려면이섹션의시작부분에설명된단계를따르십시오(Alt 키를누르거나값을수동으로입력). 또는스크립트(사용자정의포즈) 표현방법(다음그림참조)을선택하여로봇플랜지주위에서 TCP를회전하고 TCP 정의를곱한 Z 회전을 TCP 정의의시작부분에삽입합니다.
참고: 변환및포즈제공방법에대한자세한내용은기준 좌표계섹션에서확인하십시오.