로봇
하나의로봇구성은로봇의특정상태를정의합니다. 구성을변경하려면특이점을넘어야합니다. 로봇컨트롤러는선형이동이이루어질때특이점을넘을수없습니다(이를위해서는조인트이동이필요합니다).
즉, 두타겟사이에서선형이동을수행하려면첫번째지점과마지막지점을포함하여완전한이동에대해로봇구성이같아야합니다.
로봇을마우스우측버튼으로클릭하고구성 변경을선택하여로봇구성창을여십시오. 로봇패널에서추가 옵션을선택하여이창을열수도있습니다.

표준 6축로봇의경우각로봇축이한바퀴완전히움직일수있다고가정할경우로봇의어떤위치에도일반적으로 8개의다른구성이있습니다. 실제로관절한계는로봇에따라다소구속될수있습니다. 따라서, 로봇에따라특정위치에대해 1개에서 100개이상의로봇구성을가질수있습니다.
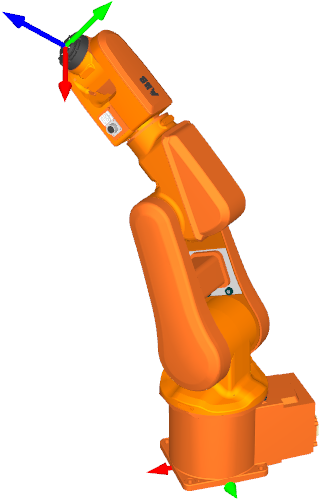
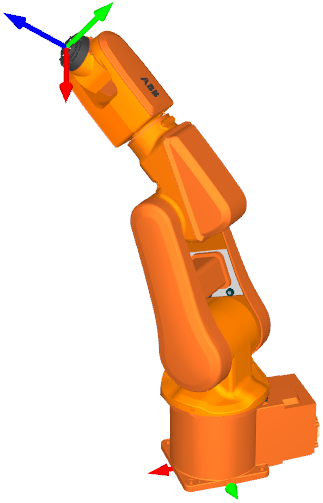
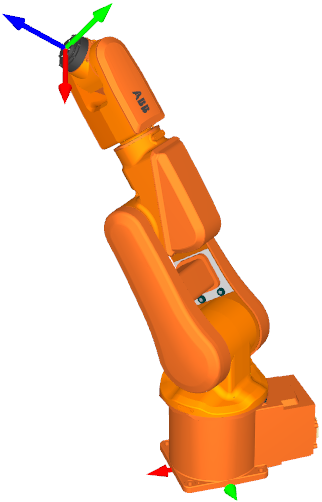
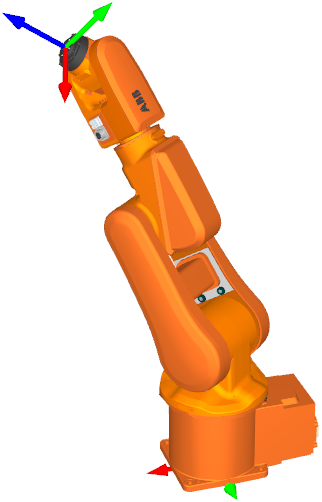
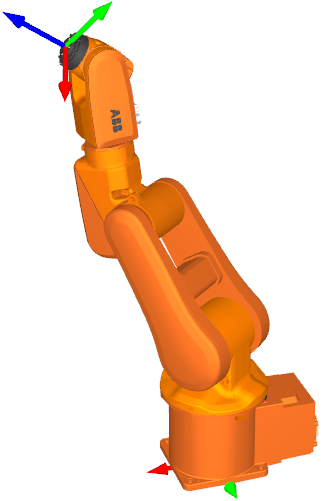
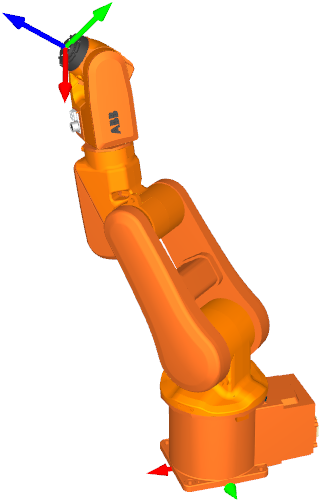
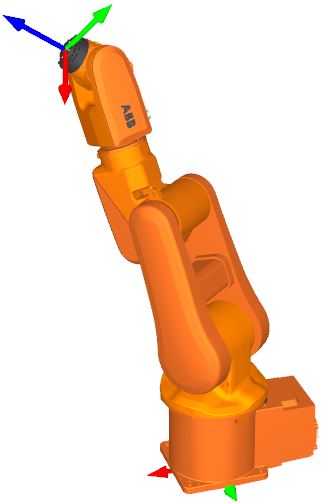
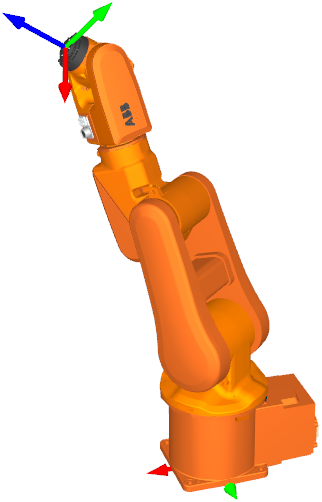
하나의로봇구성은로봇과의위치에도달하는특정한방법(조립모드)을정의합니다. 예를들어, 로봇은팔꿈치를위로올리거나팔꿈치를아래로향하게하거나 (상단대하단또는 U / D) 동시에타겟을향하거나베이스가 180도회전하여타겟을뒤로도달할수있습니다 (앞면대후면또는 F / R). 마지막으로조인트 5는축 4와축 6을동시에전환하여부호를전환하여뒤집을수있습니다(플립대논플립또는 F / N). 전체적으로 2 * 2 * 2 = 8 구성을제공합니다.