로봇
항목트리(또는 3D 보기)에서로봇을더블클릭하여로봇패널을여십시오. 로봇축을조인트축조그섹션에서조그하고텍스트상자에특정조인트축값을입력할수있습니다. 이러한값과로봇위치는로봇컨트롤러값과일치합니다.
로봇축한계를수정하려면조인트한계를두번클릭하십시오. 기본적으로BoboDK는로봇제조업체의사양에따른하드웨어한계를사용합니다. 일부애플리케이션은더많은축한계(소프트웨어한계)를요구할수있습니다. 조인트값은해당섹션의해당버튼을사용하여값목록으로복사하거나붙여넣을수있습니다.
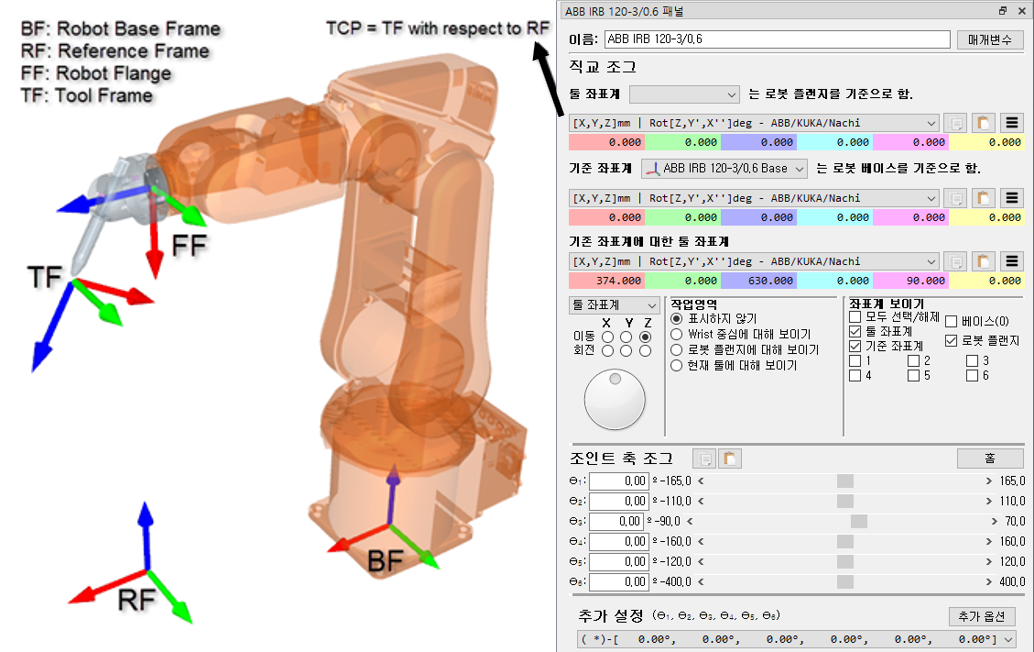
카르테시안조그섹션에는로봇운동학과관련된모든정보가표시됩니다.
●로봇플랜지(FF)에관한툴 프레임(TF)은로봇플랜지와관련하여선택된툴프레임이위치한위치를정의합니다. 로봇플랜지는항상같지만, 로봇에탑재된도구에따라툴프레임이바뀝니다. 이관계는대부분의로봇컨트롤러에서 UTOOL, ToolData 또는 Just Tool로도알려져있습니다. 로봇공구는 TCP(툴중심점)라고도합니다. 선택된툴은 "활성" 도구가됩니다. 활성도구는새대상과프로그램을생성할때사용됩니다. 선택한도구는아이콘에녹색으로표시됩니다
●로봇기반(BF)에관한기준 좌표계(RF)는로봇기반좌표계와관련하여기준좌표계가위치한위치를정의합니다. 로봇기반좌표계는절대움직이지않지만, 같은로봇기반좌표계에관련된어떤물체도위치시키기위해다른기준좌표계를사용할수있습니다. 이관계는대부분의로봇컨트롤러에서 UFRAME, WorkObject MFRAME 또는기준으로도알려져있습니다. 로봇패널에서선택한기준좌표계가 "활성" 기준좌표계가됩니다. 활성기준좌표계가새타겟및로봇프로그램의참조로사용됩니다. 선택한기준좌표계는아이콘에녹색으로표시됩니다
●기준좌표계(RF)에대한툴좌표계(TF)는로봇의현재위치에대한활성기준좌표계에대한활성 TCP의위치를보여줍니다. 로봇을이동하려면이값을수정하십시오. 조인트축은자동으로재계산됩니다. 이러한카르테시안좌표는새타겟이생성될때로봇축과함께기록됩니다(프로그램➔타겟추가). 타겟또한활성기준좌표계에연결됩니다.
가능한구성목록은기타구성섹션에서확인할수있습니다. 로봇구성은특이점을교차하지않고로봇의특정상태를정의합니다. 구성을변경하려면특이점을넘어야합니다. 자세한내용은로봇 구성섹션을참조하십시오.
마지막으로, 오른쪽위의매개변수버튼을사용하면로봇보정프로젝트후에선호하는포스트프로세서를선택하거나정확한파라미터를추출하여약간의운동학적조정을할수있습니다. 이러한값은특정상황에서만수정해야합니다.
영상: 다음영상은RoboDK의로봇과로봇패널에대한일반적인개요를제공합니다.
https://www.youtube.com/watch?v=z357z1NlkZM&list=PLjiA6TvRACQd8pL0EnE9Djc_SCH7wxxXl&index=8