로봇
로봇툴
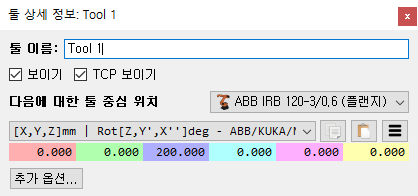
참고: TCP 포즈는로봇 패널에서수정할수도있습니다.
추가 옵션...을선택하면툴형상에축척인자를적용하거나로봇플랜지를기준으로형상을이동할수있습니다. 이러한값을변경해도로봇프로그램에는아무런영향을미치지않습니다. 형상은표시목적과충돌검사에사용됩니다 (TCP를그대로유지).
팁: 로봇플랜지대신해당참조 TCP를선택하여다른 TCP에대한 TCP의위치를제공할수있습니다. 예를들어, 절삭툴은스핀들을나타내는다른 TCP와관련하여 Z축을따라특정거리에서정의될수있습니다. 이 예제는더많은세부사항을제공합니다.
영상: 다음영상은로봇툴(TCP)에대한일반적인개요를제공합니다.
https://www.youtube.com/watch?v=FltOFBCzx-w&list=PLjiA6TvRACQd8pL0EnE9Djc_SCH7wxxXl&index=11