로봇
로봇타겟을사용하면특정로봇위치를기록하여해당위치로로봇을이동할수있습니다.
다음단계에따라새대상을추가하고여기에첨부된정보를확인하십시오.
●새로운타겟생성을위해프로그램 ➔ 
그러면활성기준좌표계와활성툴좌표계를사용하여로봇의현재위치가기록됩니다. 타겟이활성기준좌표계에추가될것입니다.
●타겟을마우스우측버튼으로누른후옵션...(F3)를선택하여기록된포즈및조인트값을확인하십시오.
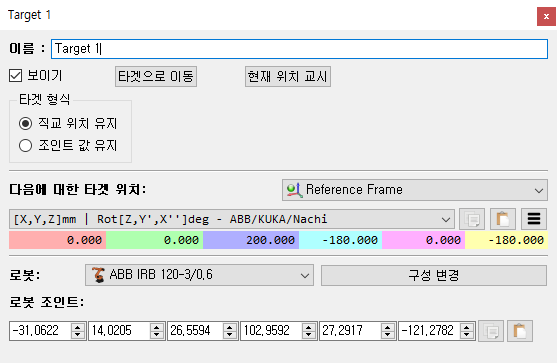
새로운타겟을생성하면현재로봇축뿐만아니라카르테시안공간의기준좌표계에관한 TCP를기록합니다. 기본적으로 RoboDK는대상을카르테시안타겟으로생성합니다(카르테시안 위치 유지 
한편, 조인트공간에서타겟을지정할수있습니다(조인트값 유지
조인트타겟을사용해작업구역에가까운첫번째접근위치에도달한다음, 기준좌표계나툴좌표계를수정했을때툴경로가변경되지않도록하는것이일반적인관행입니다.
팁: 타겟으로 이동을선택하면트리또는 3D 보기에서해당타겟을선택하는것과같은효과가있습니다.
로봇과같은자세를취하기위해다른구성을볼수있습니다. 섹션에서좀더자세한정보를확인할수있습니다.