OPC UA
이예제는 RoboDK에 OPC-UA 클라이언트연결을추가하는방법을보여줍니다. RoboDK에는 RoboDK 프로젝트에 OPC UA 호환성을추가할수있는 OPC-UA add-in이포함되어있습니다.
이예제에서는 OPC UA 클라이언트를통해 RoboDK Station에서데이터를가져오는방법을배웁니다.
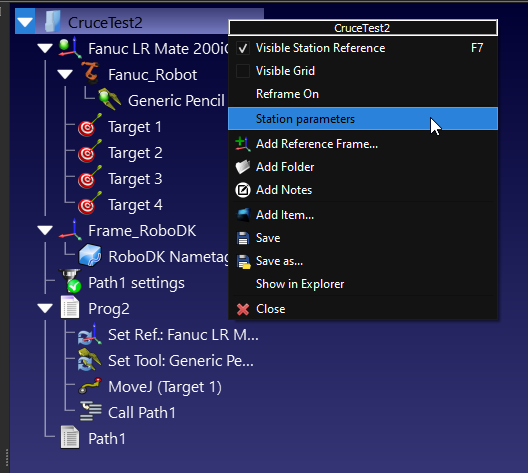
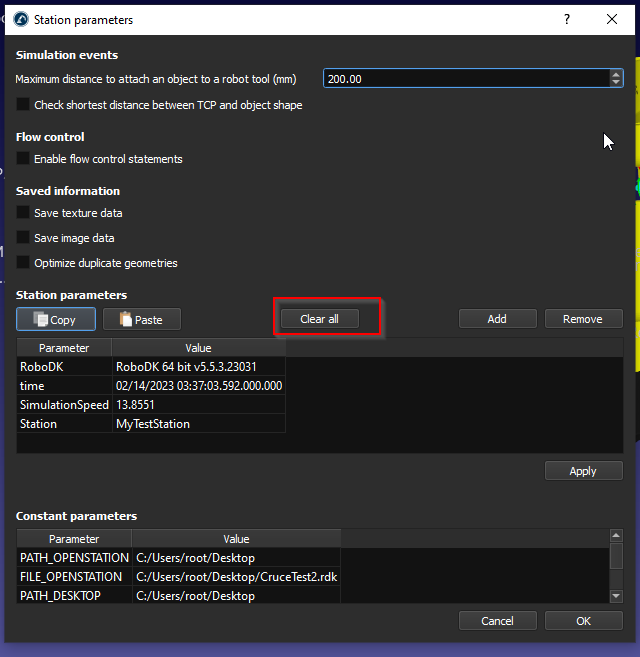
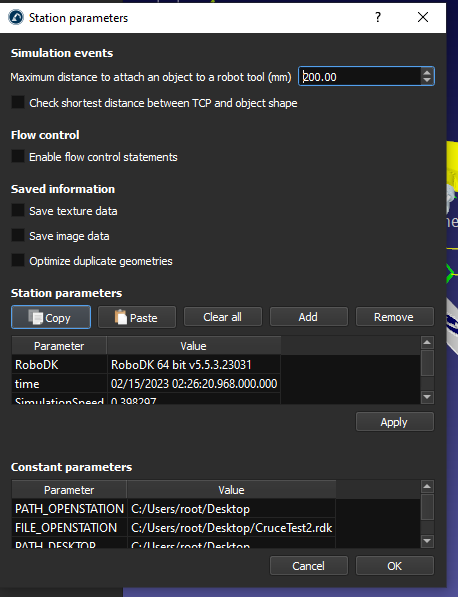
스테이션매개변수화면이표시되면 '모두지우기'를눌러모든스테이션매개변수를삭제합니다.
인터페이스를 통한 구현
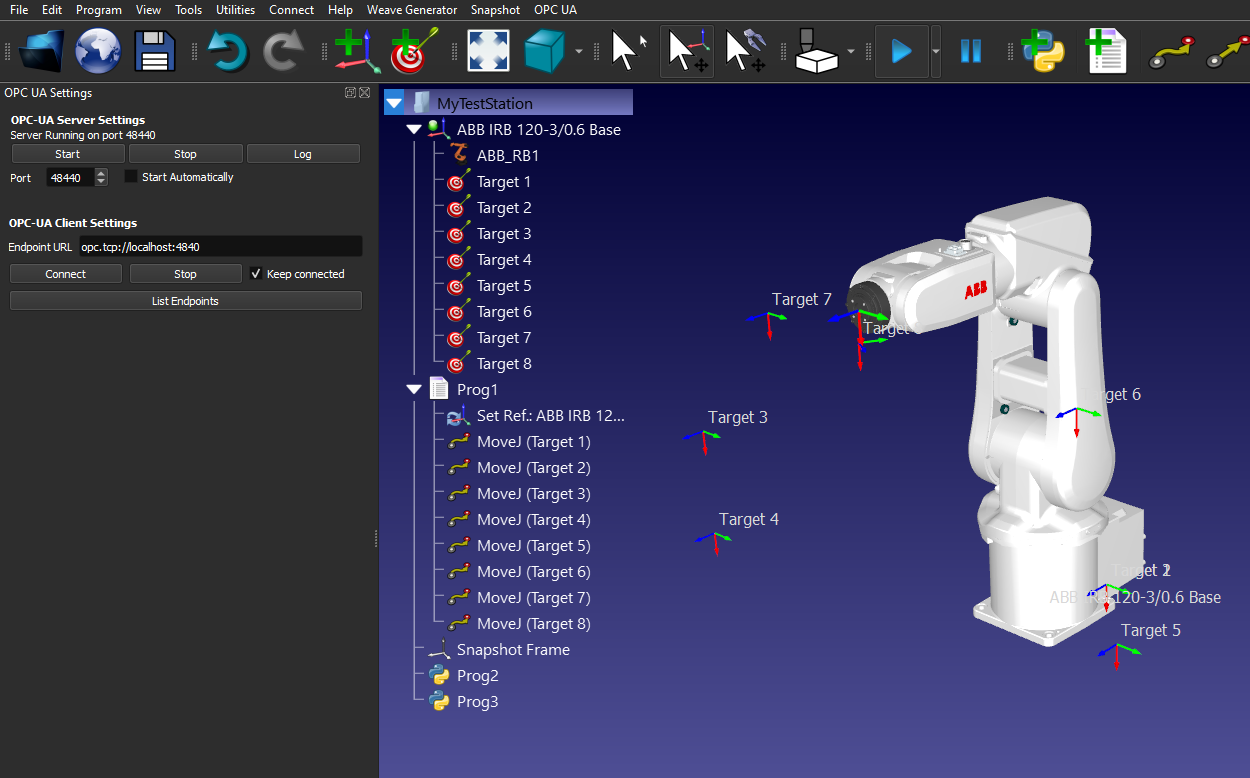
OPC UA 서버가구성되고시작된상태에서 RoboDK 프로젝트를하나더생성할수있습니다.
클라이언트 추가
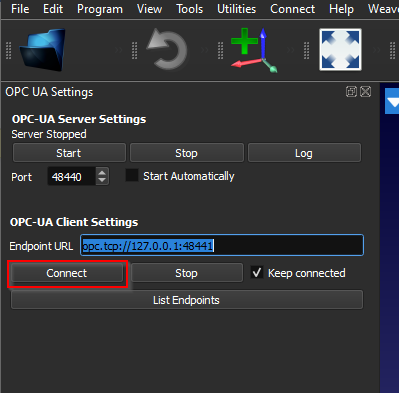
이섹션에서는 OPC UA 클라이언트를추가하는방법을설명합니다.
엔드포인트 URL을입력합니다(예: opc.TCP://127.0.0.1:48441).
IP 주소및포트구성을 Target OPC UA 서버와일치시켜야합니다.
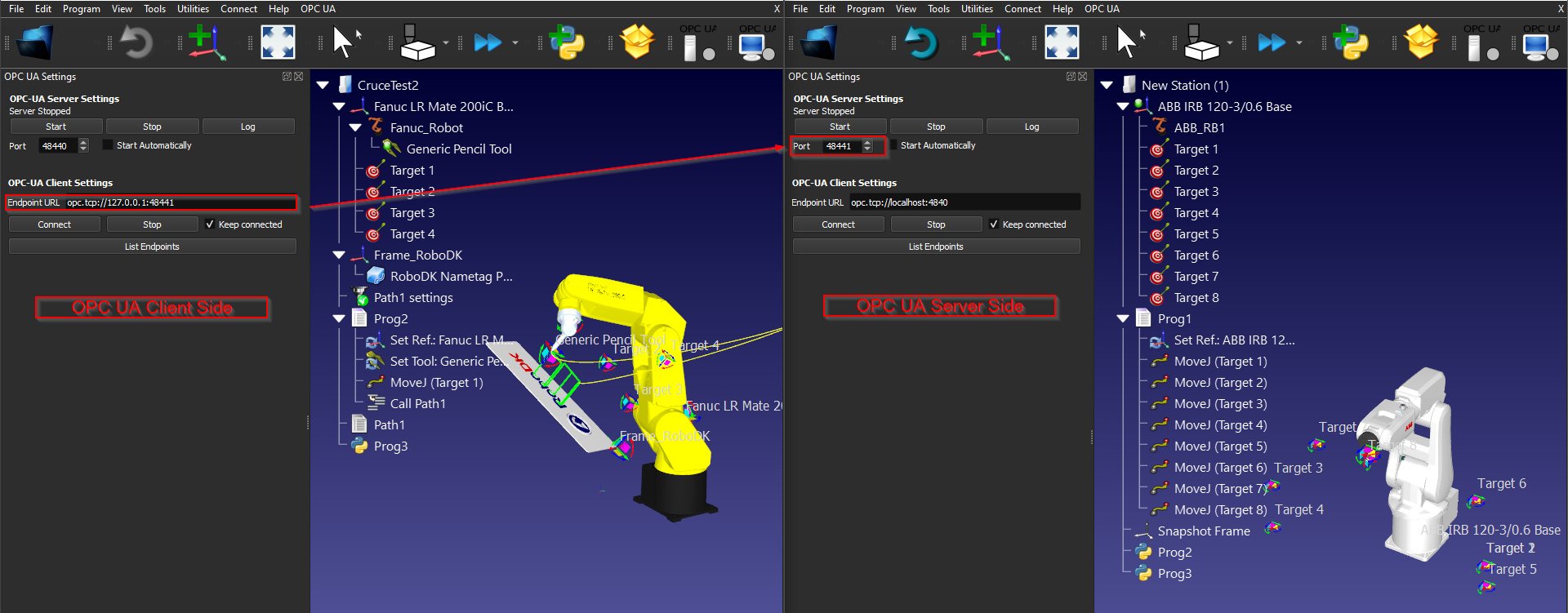
'연결'을눌러연결을설정합니다.
"서버변수가검색되었습니다."라는메시지가표시되면연결이설정된것입니다. 스테이션항목을마우스오른쪽버튼으로클릭하고 '스테이션매개변수'를선택하여변수를확인하세요."라는메시지가표시되면연결이설정됩니다.
스테이션을마우스오른쪽버튼으로클릭하고"스테이션매개변수"를선택합니다.

클라이언트 노드
노드 섹션에서각노드의세부정보를확인할수있습니다.
RoboDK API
RoboDK의 OPC UA 클라이언트를통해 OPC UA 서버에서노드데이터를가져온후, RoboDK-Python-API를사용하여이러한데이터를가져올수도있습니다.
설치
이링크를참조하여 RoboDK Python-API를설치할수있습니다.
https://robodk.com/doc/en/PythonAPI/intro.html#how-to-install
또는Python용 RobodK 패키지를수동으로설치하세요:
pip 설치 RobodK
스크립트
이예제스크립트는RoboDK의 Python API를통해스테이션파라미터를가져오는방법을보여줍니다.
robodk에서 로보링크 가져오기 # RoboDK API
RDK = robolink.Robolink()
robodk에서 가져 오기 * # RoboDK API
로보링크에서 가져오기 * # 로봇 도구 상자
itemlist = RDK.ItemList()
if 항목 목록:
# 모든 스테이션 매개변수 가져오기
print('Vaild 매개변수가 스테이션에 구성되었습니다...')
StationParameters=RDK.getParams()
를 스테이션 파라미터의 스테이션 파라미터로 설정합니다:
print("스테이션 매개변수 %s : %s"%(StationParameter[0],str((StationParameter[1]))))
else:
print('매개변수 목록 없음...')
다음은예제스크립트의결과입니다:
베일드매개변수는스테이션에서구성됩니다...
스테이션매개변수 RoboDK : RoboDK 64 비트 v5.5.3.23031.
스테이션매개변수시간 : 02/14/2023 03:58:29.191.000.000
스테이션파라미터시뮬레이션속도 : 13.8551
스테이션매개변수스테이션 : MyTestStation