서버
RoboDK OPC UA 서버내부에는스테이션에대한몇가지기본정보를교환할수있는몇가지노드가있습니다.
RoboDK
RoboDK 노드는 RoboDK 소프트웨어의실제버전을제공하는노드입니다.
이예제에서는 RoboDK 64비트 v5.5.3.23031 버전이사용되었습니다.

SimulationSpeed
시뮬레이션 속도는 실제 시뮬레이션 속도를 표시하고 사용자가 현재 시뮬레이션 속도를 덮어쓸 수 있는 노드입니다.
노드 값은 시뮬레이션 속도의 슬라이드 바를 참조합니다.
이 노드에서 현재 시뮬레이션을 읽을 수 있으며 시뮬레이션 속도를 덮어쓸 수 있습니다.

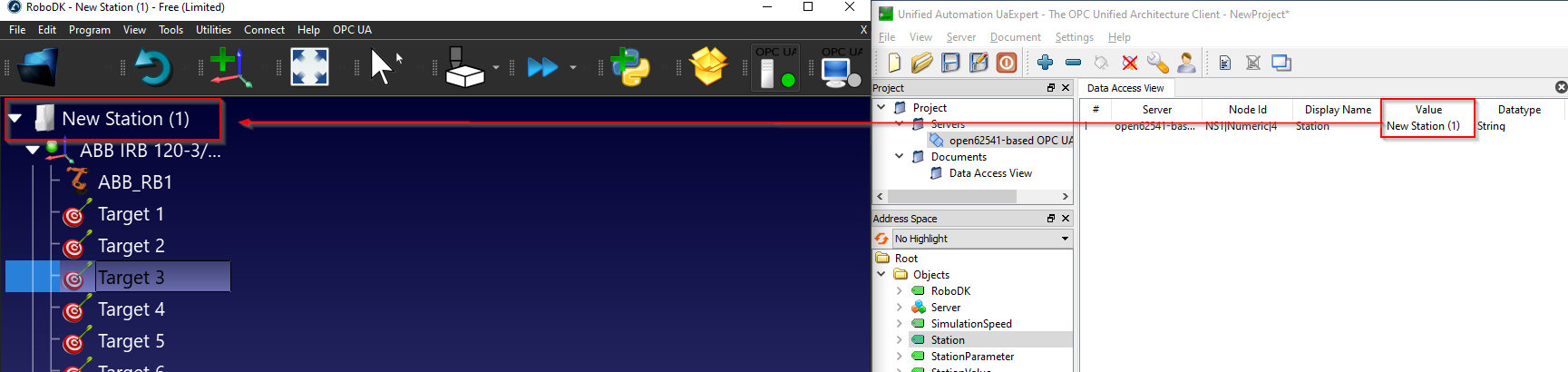
스테이션
스테이션노드는사용자가 RoboDK에서스테이션의현재이름을가져올수있는노드입니다.
아래에서볼수있듯이스테이션노드는 RoboDK에서 "스테이션이름"으로참조됩니다.
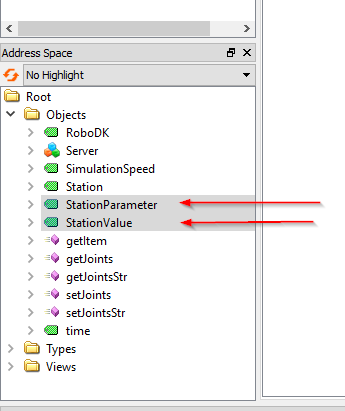
스테이션 파라미터/스테이션 값
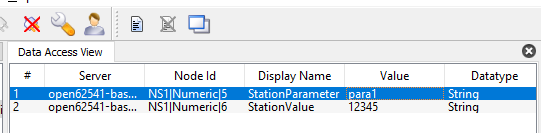
스테이션파라미터와스테이션값은사용자가스테이션내부의모든파라미터를가져오거나설정할수있는쌍으로구성된노드입니다. RoboDK OPC UA 서버는 "StationParameter"의실제값을지속적으로모니터링하고스테이션값노드에서해당 "StationParameter"의값을반환합니다.
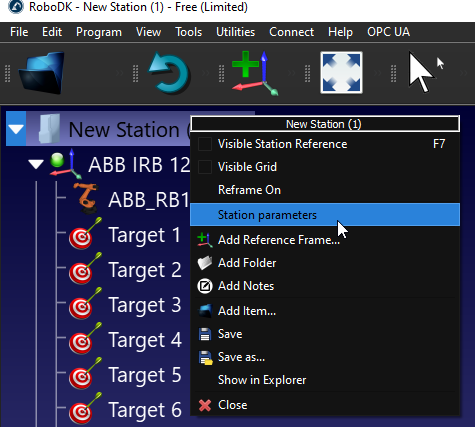
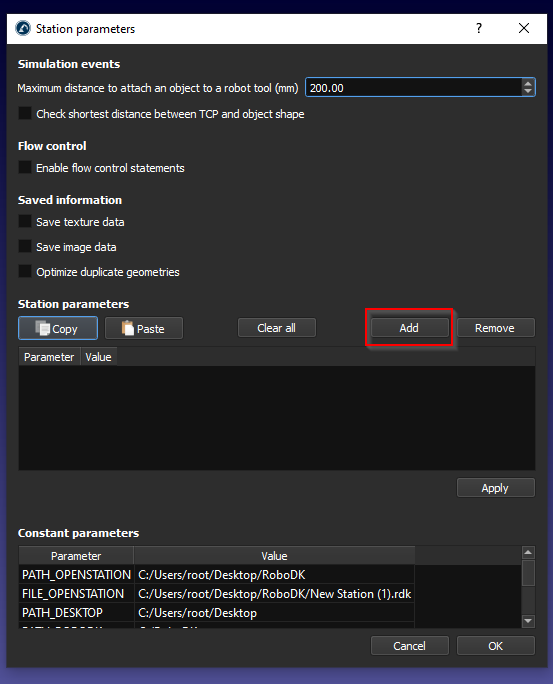
Station 파라미터를보려면 RoboDK Station > Station 파라미터를우클릭하세요.
상수매개변수필드에서기본스테이션매개변수와해당값을확인할수있습니다.
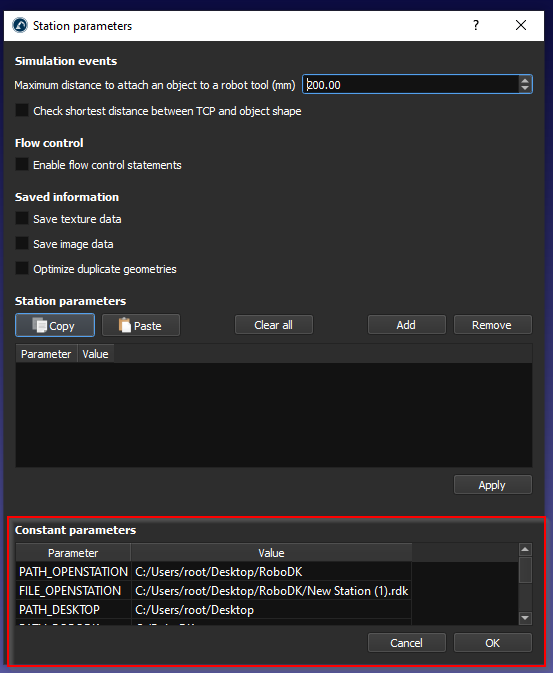
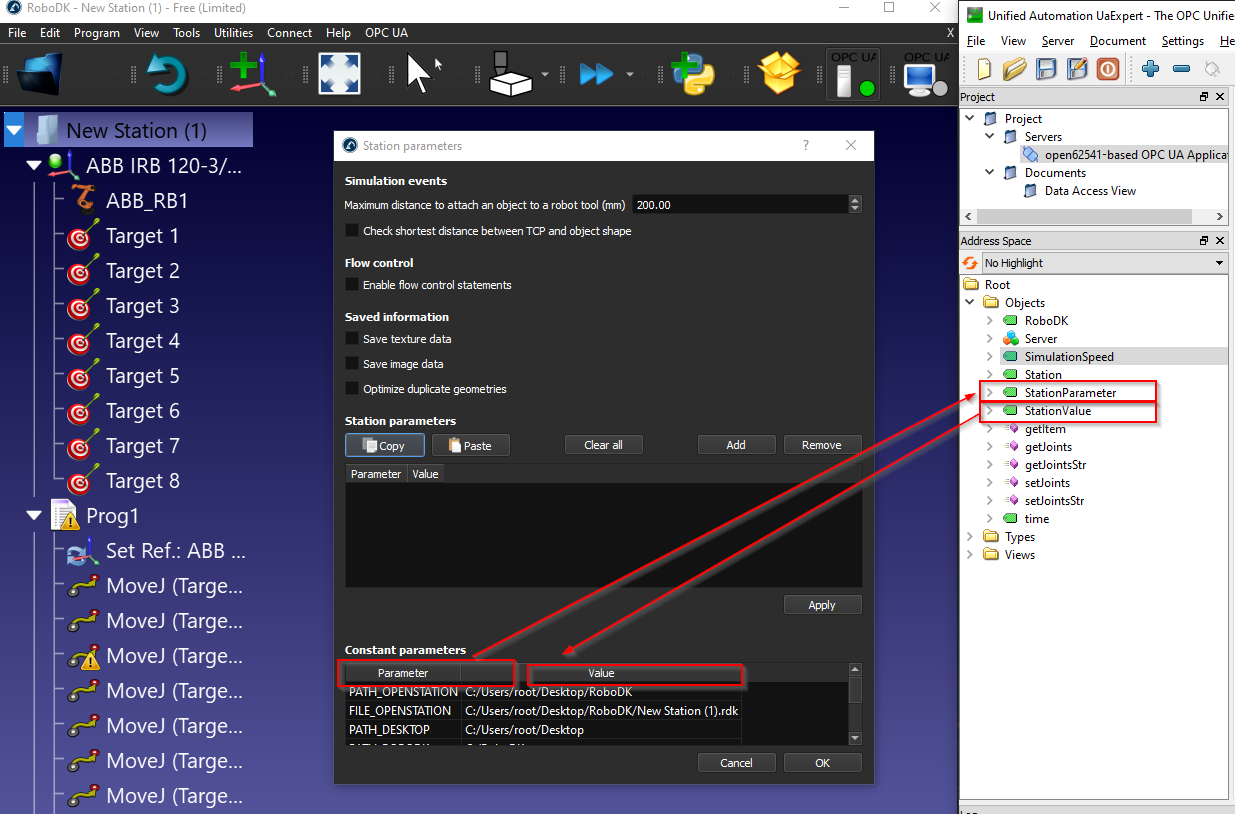
스테이션매개변수는 '매개변수' 필드를참조하고스테이션값은 '값' 필드를참조합니다.
그리고 '추가' 버튼을클릭하여자신만의파라미터를만들수있습니다.
새로운스테이션매개변수가추가됩니다.
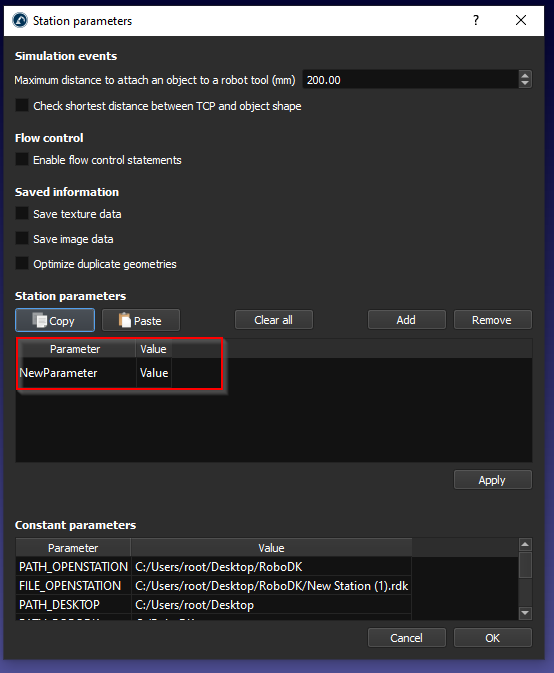
파라미터이름과파라미터값을입력한다음적용을눌러저장합니다.
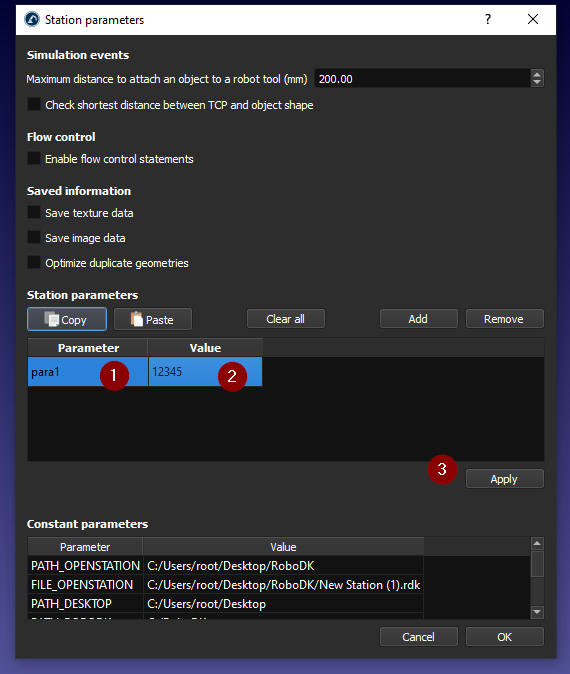
자신만의스테이션파라미터를설정할수도있습니다.
시간
노드시간은 RoboDK 스테이션의현재시간을얻을수있는노드입니다.
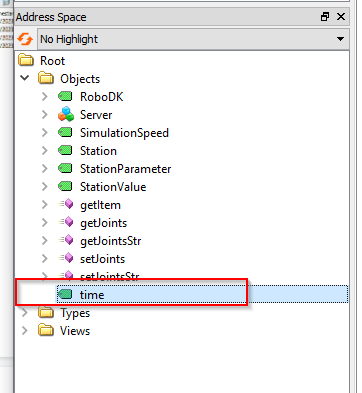
DataTime 형식의값이반환됩니다.

그리고이노드는지속적으로업데이트됩니다.
