화면표시
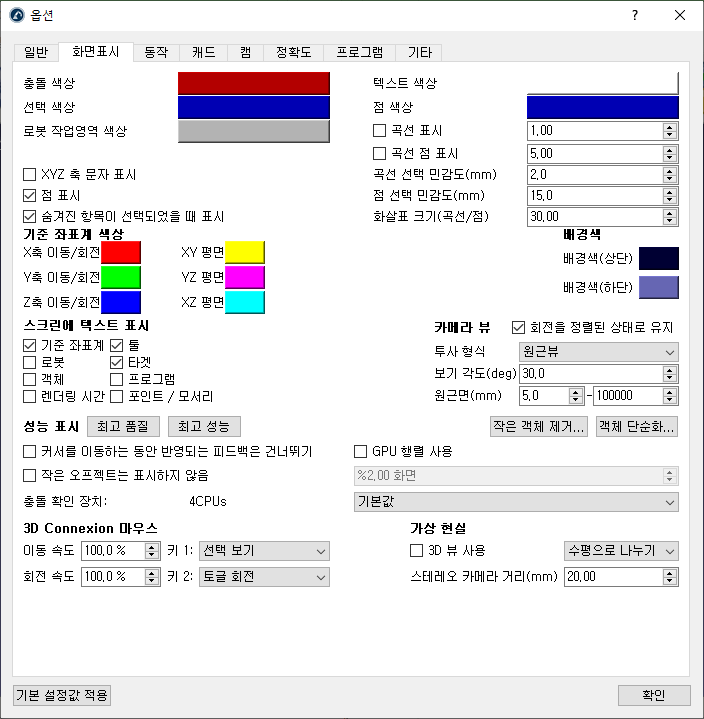
충돌색상, 선택한색상, 텍스트색상또는포인트색상옆에있는색상버튼을선택하여기본화면에서사용되는기본색상을변경하십시오.
XYZ 축 문자 표시를선택하여해당 X, Y, Z 문자와함께기준좌표계를표시하십시오. 기본적으로표시되지않으며표준빨강 (X), 초록 (Y), 파랑 (Z) 색상이사용됩니다.
곡률 및 점 감도를높이면곡선과점을각각더쉽게선택할수있습니다. 또는곡선이나점이서로너무가까워서쉽게선택할수없는경우이러한값을줄이는것이좋습니다.
화살표 크기 (곡선 / 점) 는곡선또는점추적프로젝트 (유틸리티메뉴에서사용가능)에표시되는녹색화살표의크기입니다.
기준좌표계색상과작업평면배경색상을수동으로업데이트할수있습니다(마우스로기준좌표계를이동할때평면색상이표시됩니다).
카메라 뷰는기본적으로원근뷰로설정되어있습니다. 직교뷰로변경하고뷰각도및원근면거리와같은일부카메라설정을업데이트할수있습니다.
임의의방향으로자유롭게회전하도록회전을 정렬된 상태로 유지를선택해제하십시오.
기본적으로디스플레이설정은최고 품질결과를얻도록설정됩니다. 표시되는객체가너무많아서 RoboDK가느려지는경우성능 표시를최고 성능으로설정하십시오. 이것은 GPU를강제로사용하고화면에작은물체를표시하지않습니다.
SpaceNavigator와같은3D Connexion 마우스를사용하여기본변환및회전속도를변경할수있습니다.
RoboDK를 3D 화면에표시할수도있습니다 (가상현실에 3D뷰사용). 스테레오카메라거리는물체가얼마나가까이또는멀리떨어져있는지를정의합니다.