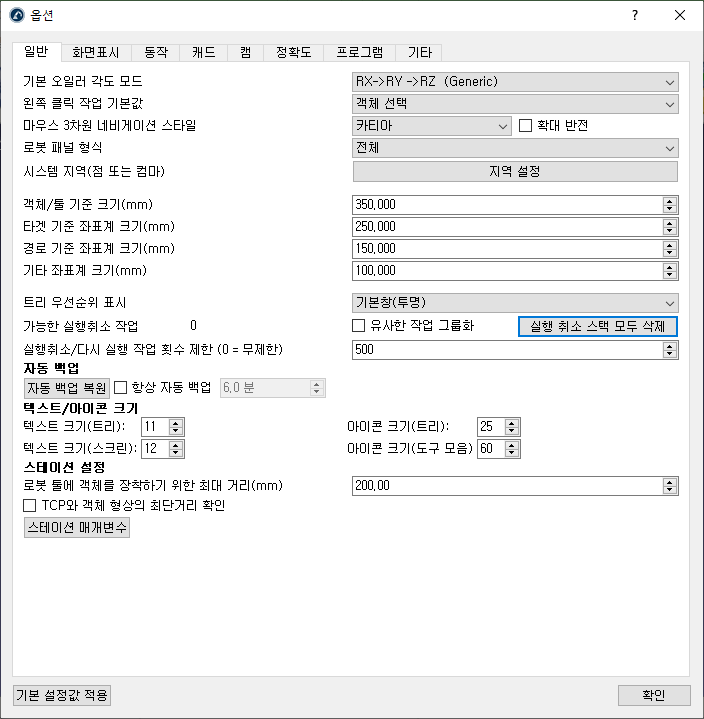
일반
기본 오일러 각도 모드에서는기본적으로프레임회전이수행되는순서를선택할수있습니다. 일반기준좌표계에는위치및방향정보가포함됩니다. 기준좌표계는포즈이며 XYZ 위치와 X, Y 및 Z 축의회전을사용하여나타낼수있습니다. 회전순서는매우중요합니다. RoboDK는사용되는로봇에따라올바른형식 / 순서를미리선택합니다. 자세한내용은기준 좌표계섹션을참조하십시오.
기본 왼쪽 클릭 동작은기본적으로객체를선택하도록설정되어있습니다. 예를들어기본적으로회전하는등다른 3D 탐색설정으로변경할수있습니다.
마우스 3차원 내비게이션 스타일을사용하면마우스로원하는 3D 탐색유형을지정하고 Rhinoceros, 카티아, 탑솔리드또는베로소프트웨어와같은특정소프트웨어를에뮬레이션할수있습니다.
로봇 패널 형식은기본적으로전체로설정되어있습니다. 이렇게하면전체로봇패널이표시됩니다. 로봇패널에서사용할수있는옵션수를줄이려면이옵션을기본또는최소로설정하십시오.
시스템 지역을사용하면지역의특정언어및국가를설정할수있습니다. 숫자가올바른형식으로표시되고적절한소수점문자가사용됩니다.
객체/타겟/경로/기타 좌표계 크기는특정항목에대한화면의프레임크기를정의합니다. + 및–키를사용하여크기를비례적으로늘리거나축소하는것을추천합니다.
화면표시 트리 환경설정은기본적으로메인윈도우내에스테이션트리를표시합니다. 트리를별도의창으로표시하려면사이드 윈도우로변경하십시오.
RAM 메모리를지우려면실행 취소를통해지울수있습니다. 메모리에보관될실행취소 / 다시실행작업을제한할수도있습니다. RoboDK 속도가느려지면실행취소작업이많이저장되어있기때문일수있습니다. 기본적으로유사한동작은함께그룹화되지않습니다. 예를들어참조프레임을이동하면모든작은단계가기록됩니다. 이동작을피하려면유사한 작업 그룹화를선택하십시오.
텍스트/아이콘 크기섹션에서는트리및도구모음에서텍스트와아이콘의크기를변경할수있습니다.
로봇 툴에 객체를 장착하기 위한 최대 거리는시뮬레이션 이벤트에의해사용됩니다. 시뮬레이션이벤트는객체에툴을부착하고특정이벤트를시뮬레이션할수있습니다. 이러한이벤트는생성된코드에영향을미치지않으며, 시뮬레이션목적으로만사용됩니다.
스테이션 매개변수는 RDK 파일과함께저장되며수동으로또는 API를통해수정할수있는상태매개변수입니다. 스테이션매개변수는디지털 입력과 디지털 출력을시뮬레이션할수있으며, PLC와같은 API를통해다른시스템과시뮬레이션이통신합니다.