동작
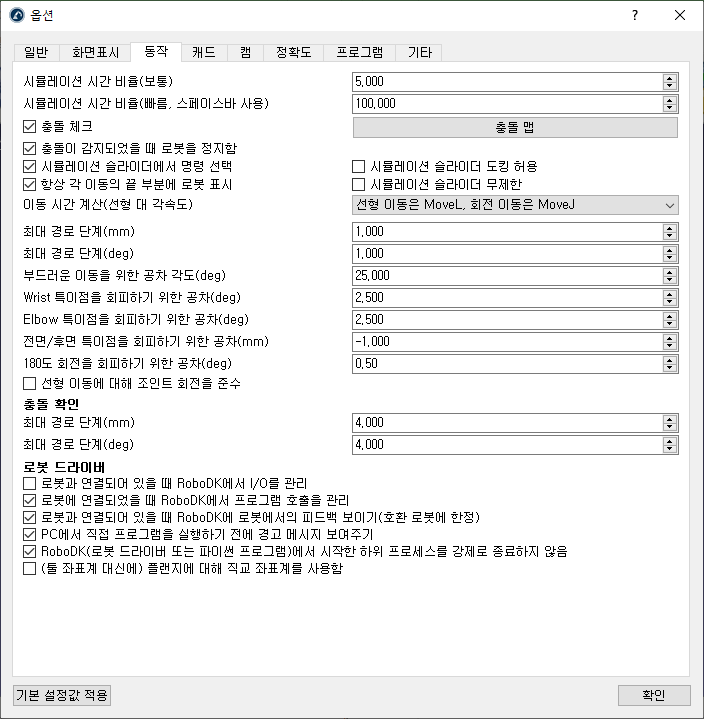
시뮬레이션시간비율은실시간에대한시뮬레이션속도를정의합니다. 기본시뮬레이션비율 5는시뮬레이터에서1초를로봇에서실시간으로실행하는데5초가걸린다는것을의미합니다. 자세한정보는시뮬레이션 비율섹션에서확인할수있습니다.



이동시간계산은RoboDK가사이클시간을계산하는방법과로봇이시뮬레이션과타이밍을위해선형/사각형속도/가속도를사용하는방법을정의합니다. 자세한내용은사이클 타임 섹션에서확인하십시오.
시뮬레이션비율이너무빠르면빠른시뮬레이션을유지하기위해컴퓨터가각경로끝에로봇을표시하지못할수있습니다. 이를피하려면각움직임이끝날때마다항상 각 이동의 끝부분에 로봇 표시를선택하십시오.
최대경로단계(mm/deg)는시뮬레이션목적으로 RoboDK가선형및조인트움직임을각각찾는방법을정의합니다.
부드러운 이동을 위한 공차 각도(deg)는손목특이점을피하기위해6축로봇에사용됩니다. 특이점이감지되면실제컨트롤러에서프로그램이올바르게실행되도록로봇프로그램을변경해야합니다.
로봇 드라이버섹션에서는로봇드라이버의동작을명시할수있습니다. 로봇드라이버는실제로봇과RoboDK 사이에영구적인연결을가능하게합니다.
로봇에연결된경우 RoboDK로 I/O를관리하면로봇의입력/출력상태를변경하는대신입력및출력을 RoboDK 스테이션매개변수로시뮬레이션할수있습니다.
로봇에 연결되어 있을 때 RoboDK에 로봇에서의 피드백 보이기옵션을선택하면로봇이이동할때실시간으로로봇이동이표시됩니다.
PC에서직접프로그램을실행하기전에경고메시지보여주기는 PC에서프로그램을실행하기전에알림창이표시될것입니다.
RoboDK에서 시작한 하위 프로세스를 강제로 종료하지 않음을선택해제하십시오. 이렇게하면새연결이설정될때다른프로세스가실행되고있지않음을확인할수있습니다.