플러그인
설정 매크로를선택하면 RoboDK와관련된 FeatureCAM 설정이열립니다. 다음이미지와같은설정창이표시됩니다.
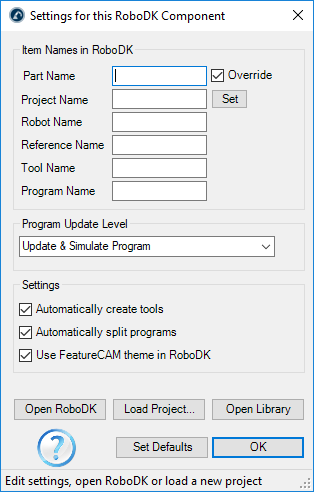
다음옵션을수정할수있습니다:
1.파트 이름은 3D 모델이 RoboDK에로드될때의이름입니다. 비워두면 FeatureCAM에서사용된이름이자동으로사용됩니다.
2.프로젝트 이름으로 RoboDK 프로젝트파일(RDK)을지정할수있습니다. 시뮬레이션을자동으로표시하거나로봇프로그램을생성하기위해기본 RoboDK 프로젝트(RDK 파일)를지정할수있습니다. 비워두면 RoboDK에서현재열려있는프로젝트를자동으로사용합니다.
3.공구 자동 생성을 사용하면 FeatureCAM에정의된공구홀더와커터형상을기반으로새 TCP를자동으로생성할수있습니다. 로봇이처음잡은공구를공구홀더로간주하고새 TCP는공구홀더에서오프셋으로계산됩니다.
4.프로그램 자동 분할은 전체로봇가공프로젝트를하위프로젝트(작업)로자동분할합니다. 각도구에대해하나의작업을생성합니다.
5.RoboDK에서 FeatureCAM 테마를 사용하면 3D 탐색및배경색상이 FeatureCAM 스타일과일치합니다.
로봇가공작업을위한공구홀더와기준프레임(데이텀)을지정할수도있습니다.
프로젝트 로드...를 선택하면최근에연프로젝트를미리보거나기본설정을사용하여새프로젝트를만들 .
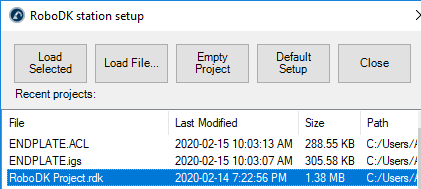
다음옵션을사용할수있습니다:
●선택된로드: RoboDK에서사용된이전프로젝트(RDK 파일)를로드합니다.
●파일로드...: RoboDK 스테이션파일(RDK)을선택하여 RoboDK로열고현재 FeatureCAM 프로젝트의기본프로젝트로사용할수있습니다.
●빈프로젝트: 새빈스테이션으로 RoboDK를열어새설정을구축합니다. 새프로젝트를처음부터설정하는방법에대한자세한내용은 시작하기 섹션에서 확인할수있습니다.
●파트로드: 파트를 FeatureCAM에서 RoboDK로로드합니다(파트는 STL 파일로저장되고자동으로로드됩니다).
●기본설정: 기본로봇, 스핀들및기준프레임으로새스테이션을설정합니다. 파트는 RoboDK로자동으로내보내집니다.
로봇가공을위한새로운설정을구축하는방법에대한자세한내용은로봇가공 섹션을 참조하세요.