Autodesk Fusion 360용 RoboDK 기본도구모음은 CAD 및 CAM용으로 7개의명령을사용하는 RoboDK 전용도구모음이포함되어있습니다.
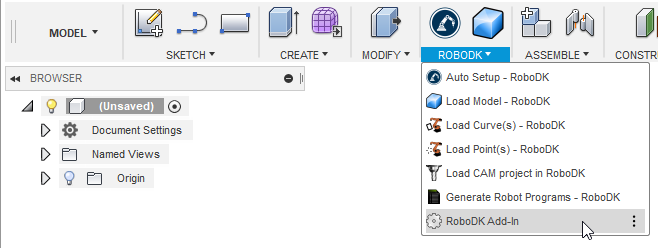
팁: 도구모음의상단오른쪽메뉴에서특정명령을볼수있도록도구모드에핀을선택할수있습니다.
● 자동 설정 – 이버튼을사용하면선택한형상 (곡선또는점)을로드할수있습니다. 커브법선을추출할표면을선택할수도있습니다. 형상은 3D 모델과함께 RoboDK에로드됩니다.
자동 설정 – 이버튼을사용하면선택한형상 (곡선또는점)을로드할수있습니다. 커브법선을추출할표면을선택할수도있습니다. 형상은 3D 모델과함께 RoboDK에로드됩니다.
팁: Ctrl 키를눌러여러형상(항목)을선택할수있습니다. 명령을수행하기전에형상을선택해야합니다.
● 부품 로드–Fusion 360에서 RoboDK로 3D 모델을로드합니다. 커브나점과같은기능은로드되지않습니다.
부품 로드–Fusion 360에서 RoboDK로 3D 모델을로드합니다. 커브나점과같은기능은로드되지않습니다.
● 포인트 로드–RoboDK에서선택된모든포인트를새로운객체로로드합니다. 선택한모든표면이포인트법선을계산하는데사용됩니다. 로봇의접근방식및축을정의하기때문에이선은중요합니다.
포인트 로드–RoboDK에서선택된모든포인트를새로운객체로로드합니다. 선택한모든표면이포인트법선을계산하는데사용됩니다. 로봇의접근방식및축을정의하기때문에이선은중요합니다.
● 곡선 로드– RoboDK에서선택한모든곡선을새항목으로로드합니다. 선택된모든표면은곡선법선을계산하는데사용됩니다. 이러한표준은로봇의접근축을정의하기때문에중요합니다.
곡선 로드– RoboDK에서선택한모든곡선을새항목으로로드합니다. 선택된모든표면은곡선법선을계산하는데사용됩니다. 이러한표준은로봇의접근축을정의하기때문에중요합니다.
● 설정– 기본 설정화면을엽니다.
설정– 기본 설정화면을엽니다.
● 캠 프로젝트 로드 –RoboDK에서가공프로젝트를로드합니다. 가공에여러공구를사용하는경우 RoboDK는자동으로프로그램을나누어각공구에대해하나의프로젝트설정을갖습니다. 이동작은도구-옵션-캠에서변경할수있습니다.
캠 프로젝트 로드 –RoboDK에서가공프로젝트를로드합니다. 가공에여러공구를사용하는경우 RoboDK는자동으로프로그램을나누어각공구에대해하나의프로젝트설정을갖습니다. 이동작은도구-옵션-캠에서변경할수있습니다.
● 로봇 프로그램 생성– RoboDK 프로젝트에서사용할수있는모든프로그램을생성합니다.
로봇 프로그램 생성– RoboDK 프로젝트에서사용할수있는모든프로그램을생성합니다.
자동 설정및커브 로드또는포인트 로드의주요차이점은자동설정이부분을로드하고새로운곡선 / 포인트추적프로젝트를생성하는것입니다. 커브로드또는포인트로드를사용하면시간을더절약할수있고이전에정의된 RoboDK의설정을유지하면서기존형상정보만업데이트합니다.
팁: 기본설정을사용하여 Fusion에서두개이상의객체를로드하려면 RoboDK에서객체를로드한후객체이름을변경하십시오.
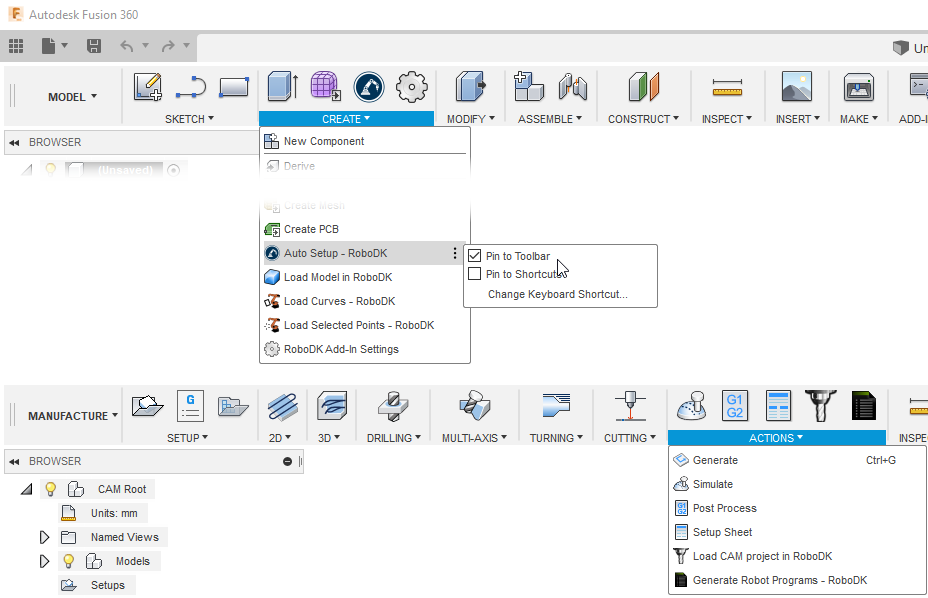
또한, MODEL Workspace (CAD 피처)의 CREATE 탭에5개의명령이있고MANUFACTURE Workspace (CAM 피처)의 ACTIONS 탭에2개의명령이있습니다.