플러그인
RoboDK 설정
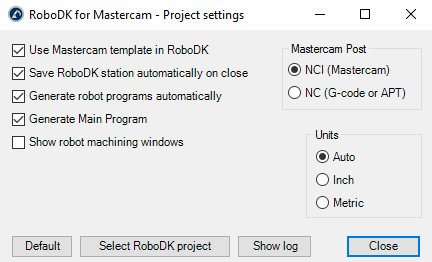
다음옵션을수정할수있습니다.
1.RoboDK 템플릿대신 Mastercam 템플릿을사용하십시오(RoboDK의 3D 내비게이션및색상템플릿은 Mastercam 스타일과일치합니다).
2.RoboDK가닫히면 RoboDK 스테이션을자동으로저장됩니다.
3.둘이상의프로그램이있는프로젝트를위한메인프로그램을생성하십시오.
4.NCI 파일대신 NC 파일(예 : APT 또는 G 코드)을사용하십시오. RoboDK는다음파일을읽어로봇프로그램을생성할수있습니다.
a.NCI : Mastercam 기본툴패스.
b.G 코드파일 (일반적인5축포스트프로세서필요).
c.APT 파일 (포스트프로세서필요).
5.활성프로젝트를선택하십시오. 시뮬레이션을자동으로표시하거나로봇프로그램을생성하기위해기본 RoboDK 프로젝트(RDK 파일)를지정할수있습니다.