로봇
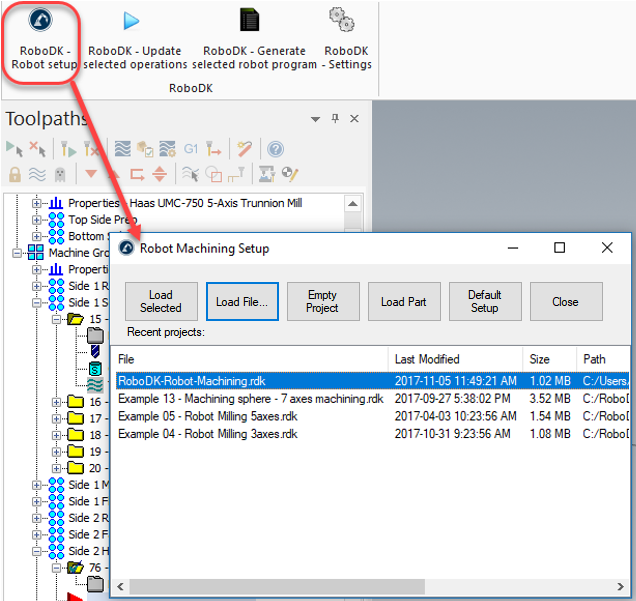
로봇설정버튼
●선택한항목불러오기: RoboDK (RDK 파일)에사용된이전프로젝트를불러옵니다.
●파일불러오기…: 파일을선택하여 RoboDK로파일을열고현재 Mastercam 프로젝트의기본프로젝트로사용합니다.
●새프로젝트: 새로운빈화면으로 RoboDK를열어사용자가새설정을구성할수있습니다. 새프로젝트를처음부터설정하는자세한정보는시작하기 섹션에서확인할수있습니다.
●부품불러오기: Mastercam에서 RoboDK로부품을불러옵니다(부품은 STL 파일로저장되고자동으로불러옴).
●기본설정: 기본로봇, 스핀들및기준좌표계를사용하여새스테이션을설정합니다. 부품은자동으로 RoboDK로내보내집니다.
새로운설정을구축하는방법에대한자세한내용은로봇 가공 섹션을참조하십시오.
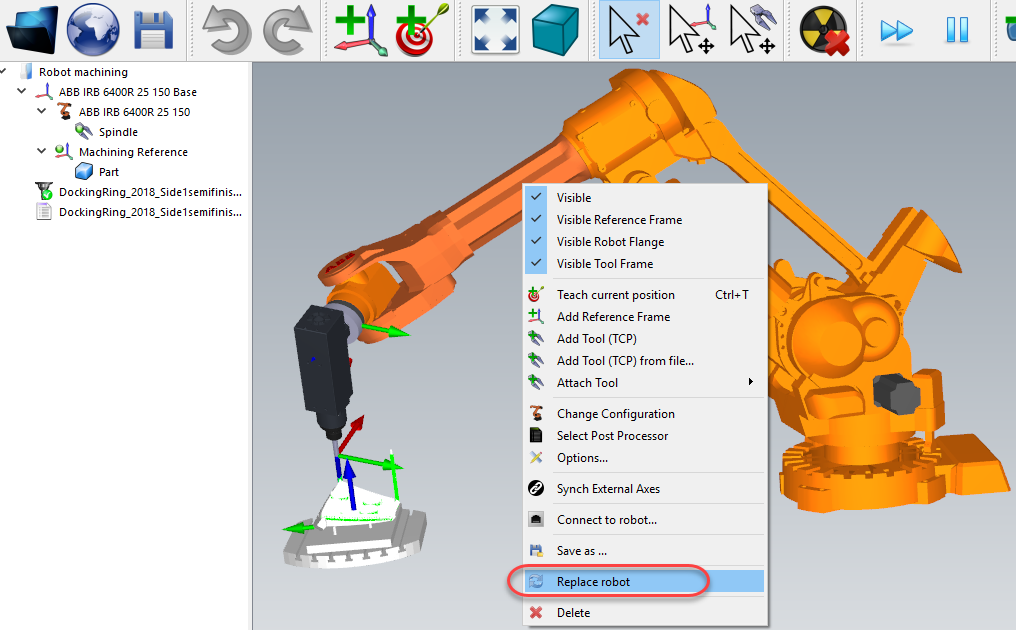
로봇을변경하고툴또는기준좌표계의수정도가능합니다. 다음단계에따라로봇을변경하십시오.
1.마우스우측버튼으로로봇을클릭하십시오.
2.그림과같이로봇 변경을선택하십시오.
3.새로운로봇을선택하십시오.
RoboDK 설치프로그램은기본적으로몇개의로봇만제공하지만, 온라인 라이브러리에서더많은로봇을다운로드할수있습니다.
로봇툴추가에대한자세한내용은시작하기 섹션에서확인할수있습니다.
팁: Alt 키를누르면기준좌표계또는로봇이이동합니다. 로봇툴(TCP)을이동하려면Alt + Shift를누른상태로유지하면됩니다.
변경사항을유지하려면파일 ➔ 스테이션 저장 (Ctrl+S).)을선택하여프로젝트를저장하십시오.