Grasshoper
Rhino 용 RoboDK 추가기능에는3개의 Grasshopper 구성요소가포함되어있습니다.

●
●
●
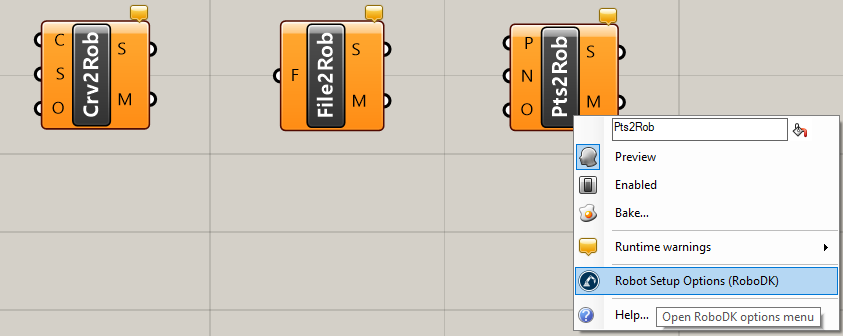
모든구성요소는상태 (S)를백분율로제시합니다(100%는로봇이프로그램을성공적으로완료할수있음을의미합니다). 또한, 각구성요소에서설명메시지 (M)를읽을수있습니다.
컴포넌트를마우스오른쪽버튼으로클릭하고로봇설정옵션(RoboDK)을선택하여하나의컴포넌트에특정한설정을사용자정의할수있습니다.
Rhino 용 RoboDK 추가기능에는3개의 Grasshopper 구성요소가포함되어있습니다.
●
●
●
모든구성요소는상태 (S)를백분율로제시합니다(100%는로봇이프로그램을성공적으로완료할수있음을의미합니다). 또한, 각구성요소에서설명메시지 (M)를읽을수있습니다.
컴포넌트를마우스오른쪽버튼으로클릭하고로봇설정옵션(RoboDK)을선택하여하나의컴포넌트에특정한설정을사용자정의할수있습니다.