Grasshopper
이예제는표면을점그리드로나누고 RoboDK에서드릴링작업을위해표면을따라로봇을이동하는Grasshopper 용 RoboDK 추가기능을사용하는방법을보여줍니다.
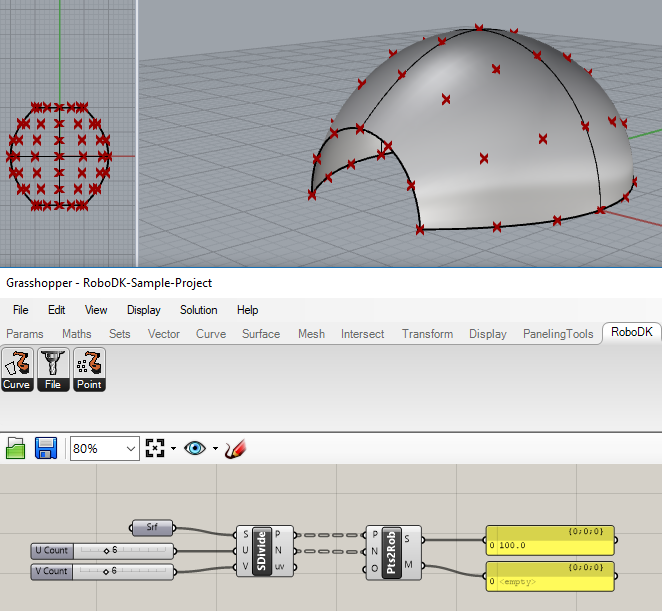
1.RoboDK 추가기능 (3dm 파일및 gh 파일)과함께제공된 Grasshopper 예제를불러옵니다.
팁: Rhino에서 Grasshopper를시작하려면 Grasshopper 명령을입력하십시오.
2.Pts2Rob 구성요소를마우스우측버튼으로클릭하고로봇 설정 옵션(RoboDK)을선택하십시오. 프로젝트 불러오기…를선택하고기본설정을선택하여샘플 RoboDK 스테이션을불러옵니다(이전섹션에표시된같은샘플프로젝트).
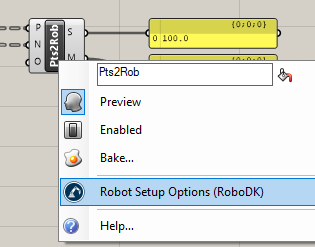
선택적으로객체이름을컴포넌트입력 (O)으로제공할수있습니다. 컴포넌트옵션에서프로젝트를지정하여원하는 RoboDK 프로젝트를각컴포넌트와함께사용할수도있습니다.
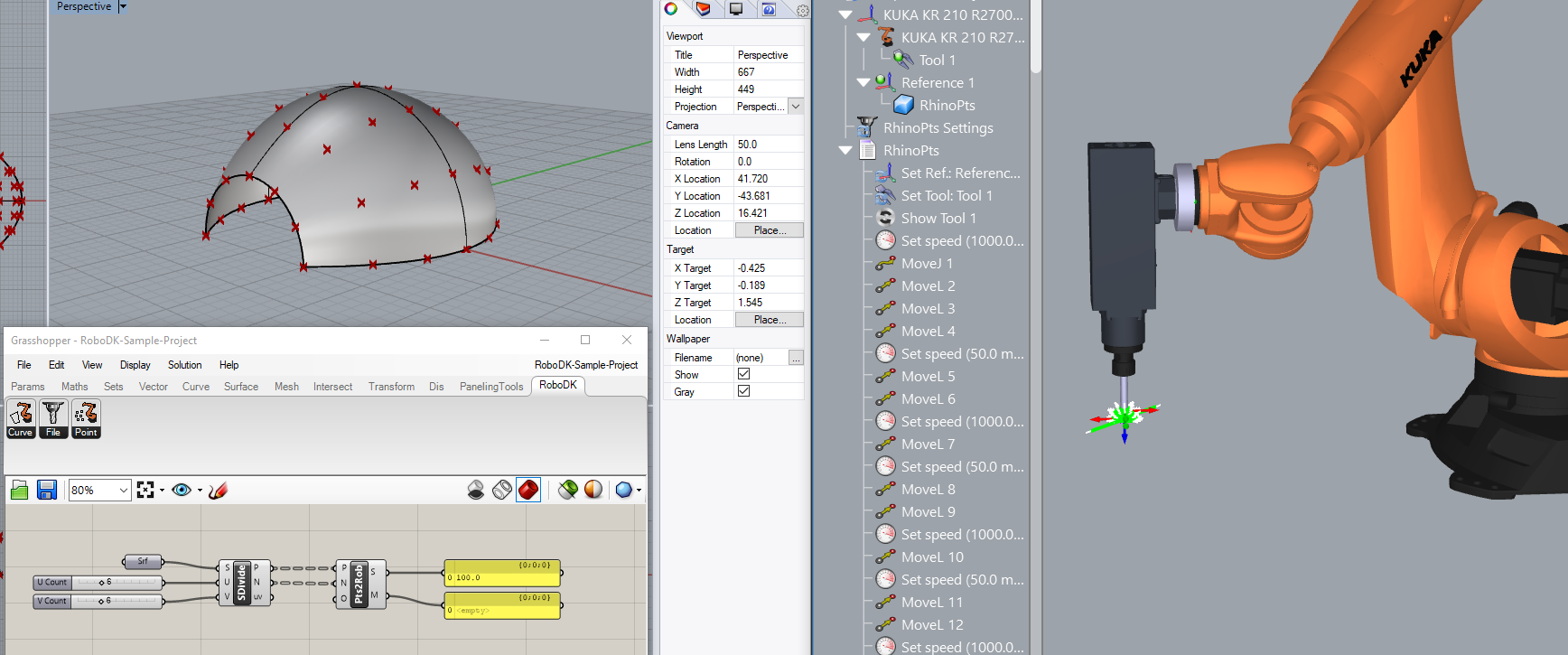
3.Grasshopper에서Solution➔Recomute (F5)를선택하여 RoboDK에서부품과프로그램을업데이트하십시오.
참고: RoboDK에서로봇설정을업데이트하십시오. 예를들어, 기준좌표계또는툴좌표계를더블클릭하여각각로봇기준또는툴에대한올바른좌표를입력하십시오.
팁: 프로그램을마우스우측버튼으로클릭하고명령표시를선택하여생성된명령을보고프로그램을디버그하십시오. 명령어추가를선택하여새명령어를수동으로추가할수있습니다.
팁: 올바른포스트프로세서선택에대한자세한내용은포스트 프로세서섹션에서확인할수있습니다.
팁: 3D HTML 또는 3D PDF 시뮬레이션을생성하려면시뮬레이션 내보내기를선택하십시오.