Rhino용 RoboDK 추가 기능
Rhino 용 RoboDK 추가기능을사용하면로봇시뮬레이션및오프라인프로그래밍을위해 Rhino의파라메트릭모델링을 RoboDK와결합할수있습니다.
Rhino 용RoboDK 추가기능은 Rhino에서생성된 3D 모델을 RoboDK에서쉽게불러올수있습니다. 이추가기능을이용하여Rhino에서직접30개이상의서로다른로봇제조업체와300대의로봇을프로그래밍할수있습니다.
로봇프로그램은곡선, 포인트또는 CAM 프로그램그룹 (예: APT 파일또는 G 코드파일)에서직접생성할수있습니다. 로봇은드릴링, 용접, 트리밍, 3D 프린팅또는로봇가공과같은다양한제조응용분야에서5축장비로쉽게프로그래밍할수있습니다. 자세한내용은로봇 머시닝 섹션에서확인하십시오.
로봇 포스트 프로세서 섹션에서는지원되는로봇브랜드및컨트롤러목록이표시됩니다. 프로그램생성을사용자정의하기위해새포스트프로세서를수정하거나작성할수도있습니다.
Rhino 용 RoboDK 추가기능은 Rhino 5 및 Rhino 6에서작동합니다. RoboDK Rhino 추가기능은무료이지만 RoboDK의특정옵션은라이선스를 구입해야합니다.
설치
Rhino 용 RoboDK 추가기능을설치하려면다음단계를따르십시오.
다운로드:
1.Rhinoceros를다운로드하여설치하십시오.
2.RoboDK를다운로드하여설치하십시오. Rhino 설치관리자파일은C : / RoboDK / Other / Plugin-Rhino /에있습니다.
3.Rhino용RoboDK 추가기능을직접또는Food4Rhino에서다운로드하십시오.
4.파일을압축해제하십시오.
RoboDK.RUI설치프로그램파일을더블클릭하고지침에따라추가기능을설치하십시오. 이절차가실패하면추가기능을 수동 설치할수있습니다.
Rhino 용 RoboDK 추가기능에는 Rhino 명령(RoboDK_...로시작), Grasshopper 구성요소및도구모음이포함되어있습니다. 도구모음의각버튼은하나의 RoboDK 명령에연결되어있습니다.
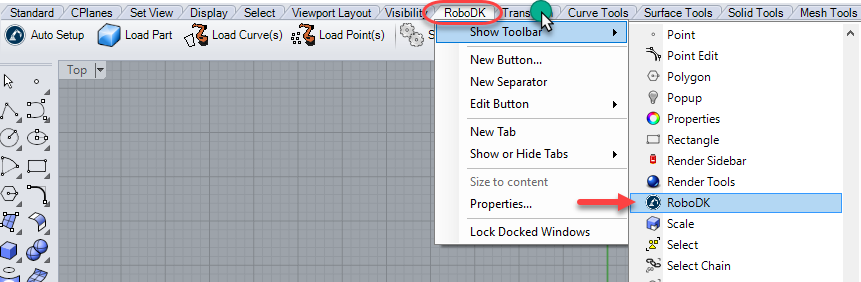
Rhino 도구 모음
Rhino 용기본도구모음에는5개의버튼이있습니다.

●
●
●
●
●
자동 설정및곡선 로드또는포인트 로드의주요차이점은자동설정이부분을로드하고새로운곡선 / 포인트추적프로젝트를생성하는것입니다. 곡선로드또는포인트로드를사용하면시간을더절약할수있고이전에정의된RoboDK의설정을유지하면서기존형상정보만업데이트합니다.
Grasshoper 도구 모음
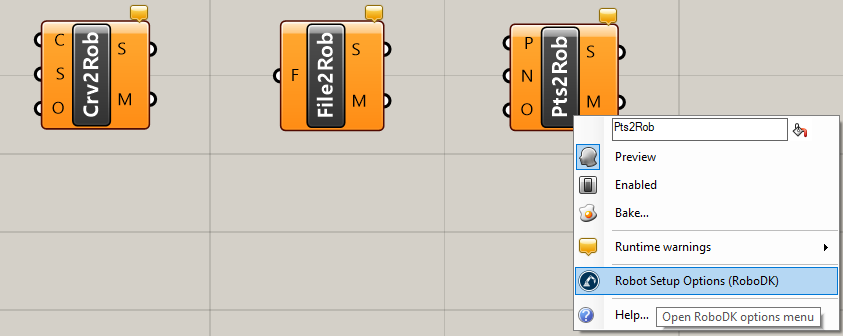
Rhino 용 RoboDK 추가기능에는3개의 Grasshopper 구성요소가포함되어있습니다.

●
●
●
모든구성요소는상태 (S)를백분율로제시합니다(100%는로봇이프로그램을성공적으로완료할수있음을의미합니다). 또한, 각구성요소에서설명메시지 (M)를읽을수있습니다.
컴포넌트를마우스오른쪽버튼으로클릭하고로봇설정옵션(RoboDK)을선택하여하나의컴포넌트에특정한설정을사용자정의할수있습니다.
설정
각 Grasshopper 구성요소에는사용자정의할수있는특정설정이있습니다. 설정버튼을선택하여 RoboDK 명령 (또는도구모음버튼)에적용되는기본설정을변경할수도있습니다.
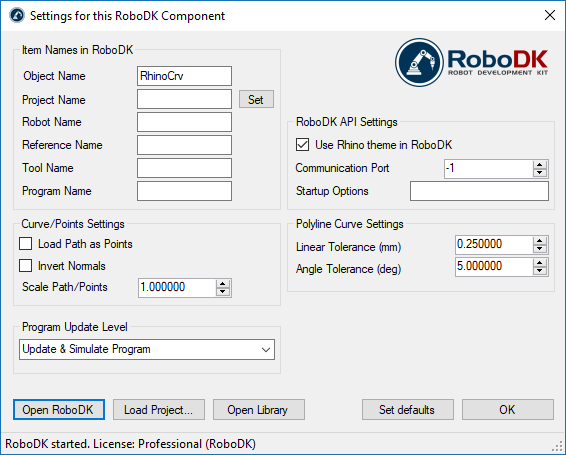
●객체 이름 – RoboDK에로드될곡선 / 포인트객체의이름을설정합니다. 경로가다시계산될때마다 RoboDK의객체가무시됩니다. 객체이름이컴포넌트입력 (O)으로제공되는경우에값은무시됩니다.
●프로젝트 이름 – 사용할 RoboDK 프로젝트 / 스테이션 (.RDK 파일)의이름 / 경로를설정하십시오. 파일이이미로드되어있으면기존프로젝트를사용합니다. RoboDK에서열린프로젝트가파일이름과일치하지않으면전체경로가지정된경우프로젝트가열립니다.
●로봇 이름 – RoboDK에로드될로봇객체의이름을설정합니다. 로봇이름은 RoboDK 스테이션트리에서볼수있는이름과일치해야합니다. 사용가능한첫번째로봇을사용하려면이값을비워두십시오(기본값).
●좌표계 이름 – 로봇과관련하여경로를배치할기준좌표계의이름을설정합니다. 이름은 RoboDK 스테이션트리에서보이는이름과일치해야합니다.
●툴 이름 –로봇과함께사용할툴(TCP)의이름을경로에따라설정하십시오. 이름은 RoboDK 스테이션트리의이름과일치해야합니다.
●프로그램 이름 – 생성할프로그램의이름또는경로를설정합니다.
●포인트로 경로 로드 – RoboDK에서포인트와포인트 추적 프로젝트로개체를만들려면이옵션을선택하십시오. 드릴링과같은제조작업에유용합니다. 곡선 추적 프로젝트로경로를로드하려면이옵션을선택취소하십시오.
●법선 반전 – 계산된표면법선을반전하려면이옵션을선택하십시오. 로봇의공구방향이반전됩니다.
●RoboDK에서 Rhino 테마 사용 – Rhino 테마로 RoboDK를시작하십시오. 여기에는 3D 내비게이션및배경색에대한마우스동작변경이포함됩니다. 이설정은 Roino로 RoboDK를시작할때만적용됩니다. 이설정은 RoboDK의도구-옵션메뉴에서변경할수있습니다.
●통신 포트 – RoboDK와통신하도록통신포트를설정하십시오. RoboDK의여러인스턴스를동시에실행할수있으며다른포트를사용하는경우다른설정을사용할수있습니다. 이값을 -1 (기본값)로설정하면기본포트가사용됩니다.
●시작 옵션 – RoboDK를처음시작할때인수가전달되도록설정합니다. 예를들어 RoboDK를자동으로시작하려면 '/ NOSPLASH / NOSHOW / HIDDEN'을설정할수있습니다. RoboDK가표시되지않아도프로그램을계속생성할수있습니다. RoboDK API의명령섹션에자세한정보가있습니다.
●선형 공차(mm) – 분할곡선에대한선형정확도를점집합으로설정합니다.
●각도 공차(mm) – 각도정확도를설정하여곡선을점집합으로나눕니다.
버튼:
●RoboDK 열기 – RoboDK에서프로젝트열기 ... 추가옵션이있는새창이열립니다.
●프로젝트 불러오기… – 이컴포넌트를사용하려는 RoboDK 프로젝트 (RDK 파일)를로드하십시오.
●라이브러리 열기 – RoboDK의온라인 라이브러리를엽니다.
●기본값 설정 – 구성요소의기본설정을지정합니다.
●확인 – 이설정을적용하고창을닫습니다. 확인을선택하지않으면변경한설정이적용되지않습니다.
예제
이섹션에서는로봇시뮬레이션및오프라인프로그래밍을위해 RoboDK에서 Rhino 프로젝트를불러오는기본제를보여줍니다.
돔 조각
돔 줄무늬
이예는샘플 RoboDK 스테이션을불러오고 (기본설정) 로봇과함께Rhino에정의된일련의곡선을따르는방법을보여줍니다.
1.Rhino에서Dome예제를불러오십시오.
2.RoboDK 탭을선택하고
3.프로젝트 불러오기…를선택하십시오.
4.기본 설정을선택하십시오. RoboDK는쿠카로봇, 하나의도구 (툴 1과같은스핀들) 및하나의기준좌표계 (좌표계 1)을사용하여샘플프로젝트를로드하고시작합니다.
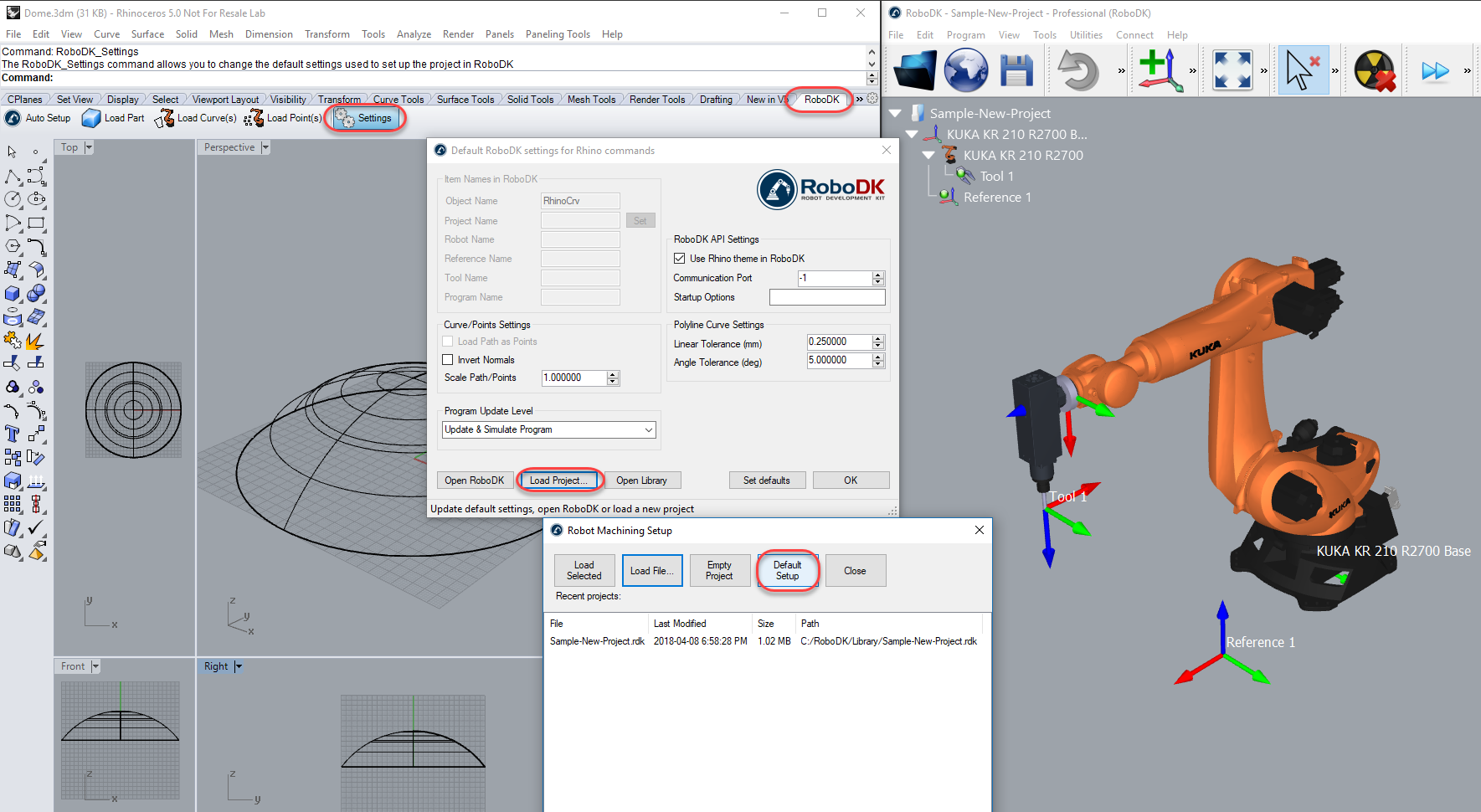
5.설정창을닫거나확인을선택하십시오.
6.Rhino에서
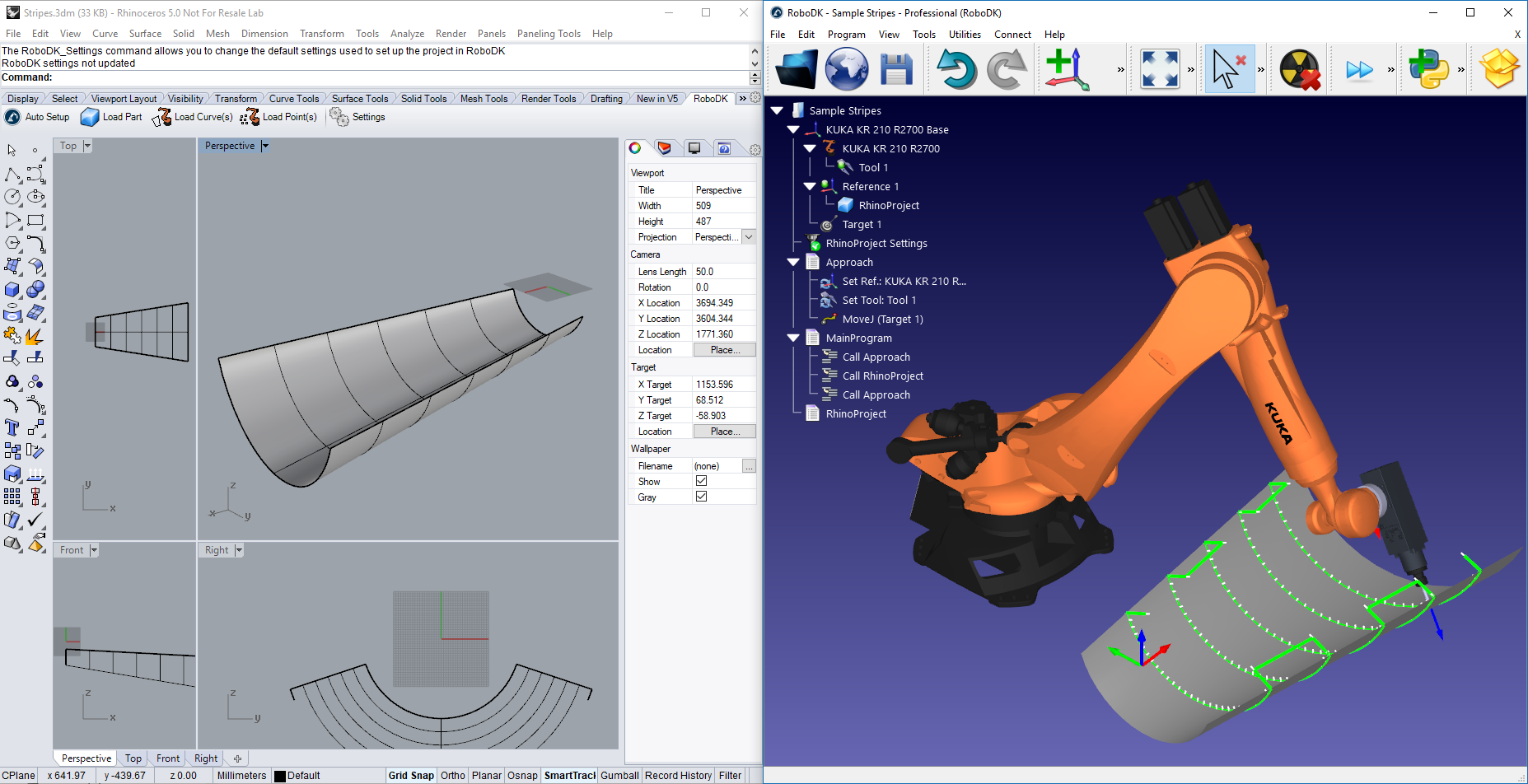
7.모든곡선과표면을선택하고 Enter 키를누릅니다 (또는마우스오른쪽버튼클릭). 다음그림과같이프로젝트가 RoboDK에로드됩니다.
활성기준좌표계 (참조 1)에로드된부품과활성로봇툴 (툴 1)을사용하여곡선을따르는 RoboDK의새곡선추적프로젝트가표시됩니다.
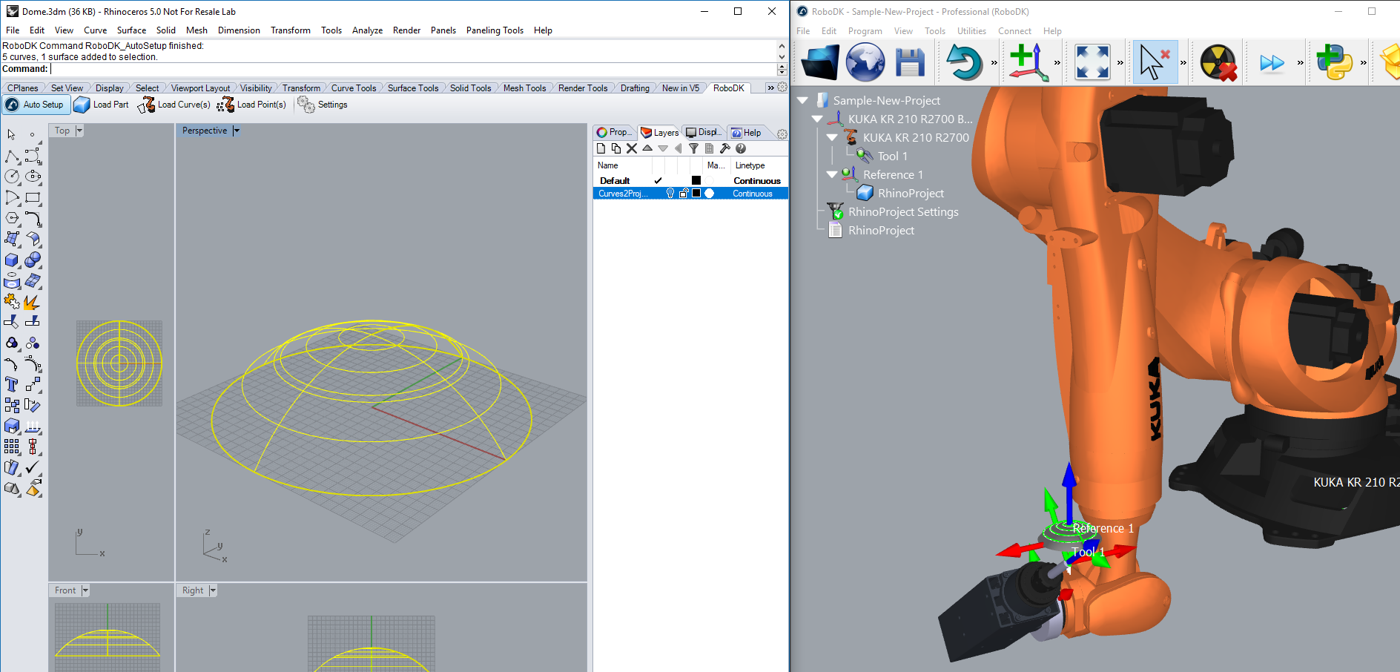
또한, 표면법선이반대방향으로추출된것을볼수있습니다. 이문제를해결하려면다음단계를따르십시오.
8.
9.법선 반전옵션을확인하십시오.
10.선택을선택하십시오.
11.6 및7의단계를반복하십시오.
이제표면법선이반전되고접근이부품상단에서시작되는것을볼수있습니다. 로봇은아무런문제없이공구경로를따라움직일수있어야합니다.
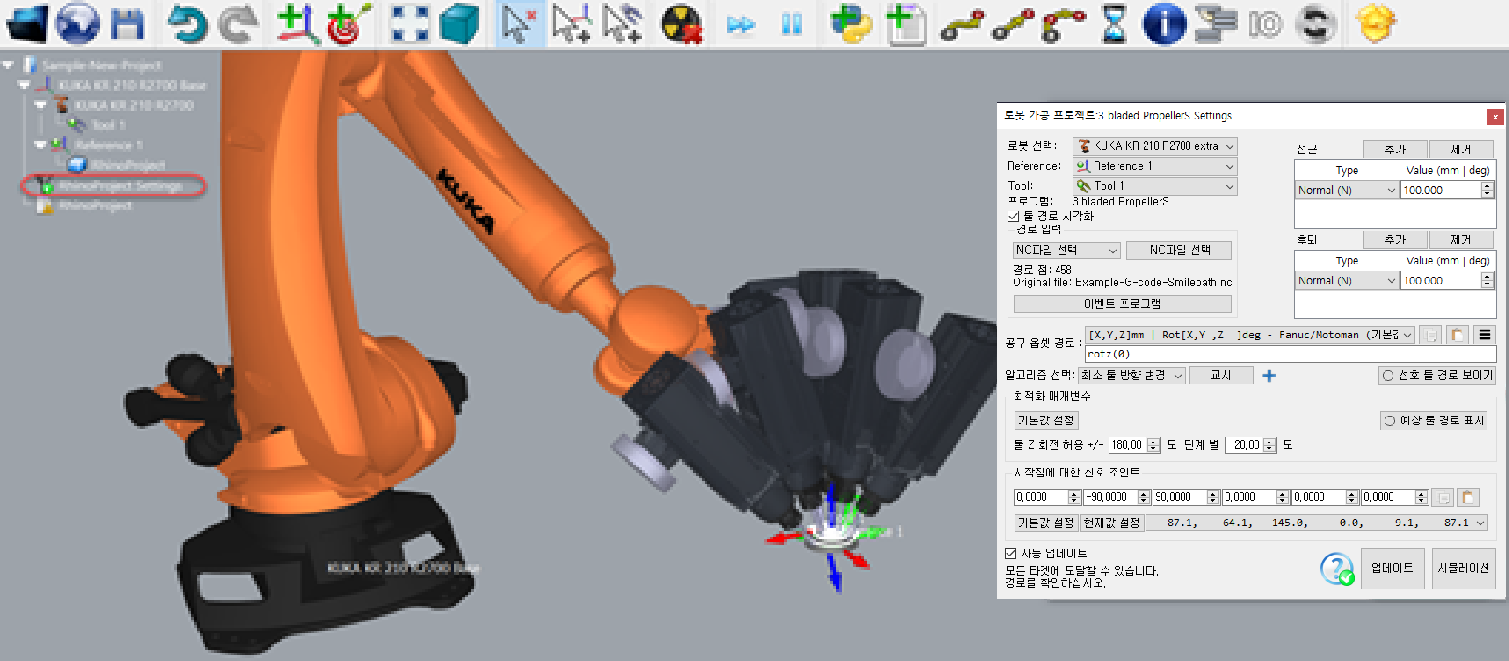
RoboDK 트리에서
예를들어, 선호 공구 경로 표시를선택하여부품에대한공구의기본방향을보고수정할수있습니다. 공구회전경로 오프셋값을변경하여추가회전을정의하십시오. 이렇게하려면새값을입력하거나마우스휠을사용하여결과를빠르게미리볼수있습니다.
이설정을변경하기위한자세한정보는로봇 가공 섹션에서확인할수있습니다.
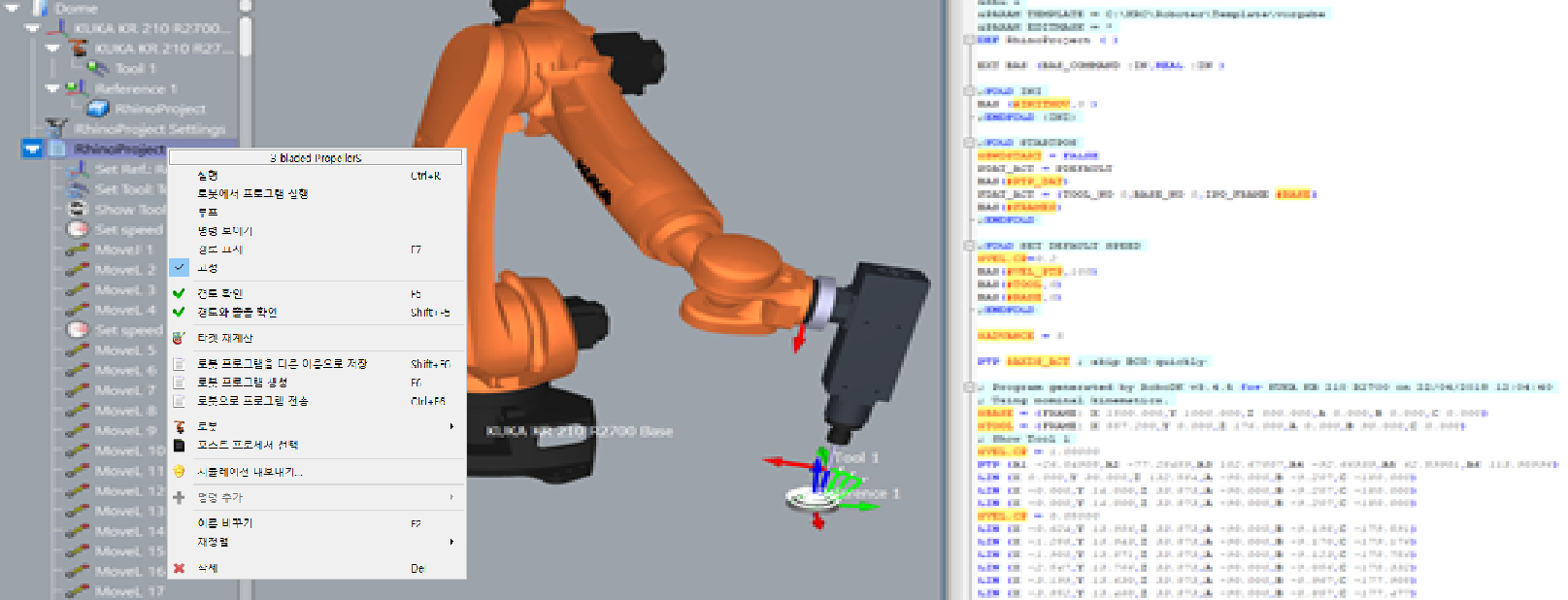
마지막으로시뮬레이션이원하는결과를생성할때프로그램을생성하거나시뮬레이션을내보낼수있습니다.
12.RhinoProject 프로그램을마우스우측버튼으로클릭하십시오.
13.로봇 프로그램 생성 (F6)을선택하십시오. 로봇프로그램이생성되어표시됩니다.
Grasshopper 예제
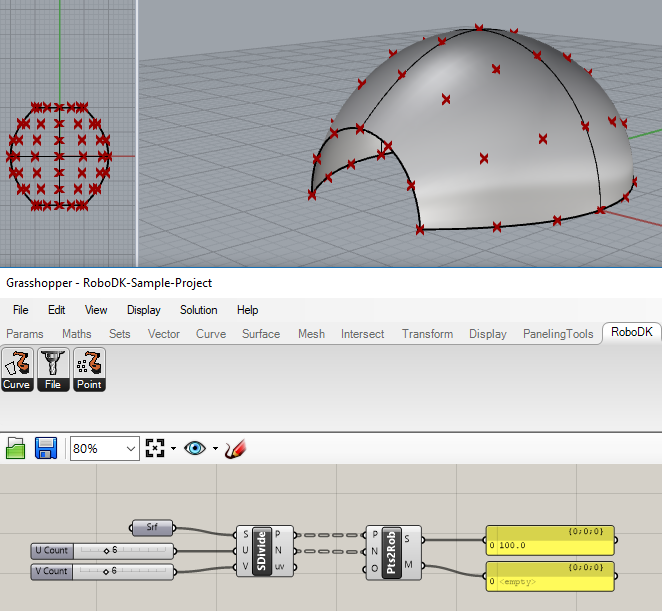
이예제는표면을점그리드로나누고 RoboDK에서드릴링작업을위해표면을따라로봇을이동하는Grasshopper 용 RoboDK 추가기능을사용하는방법을보여줍니다.
1.RoboDK 추가기능 (3dm 파일및 gh 파일)과함께제공된 Grasshopper 예제를불러옵니다.
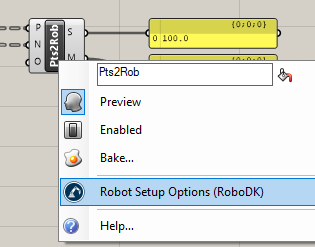
2.Pts2Rob 구성요소를마우스우측버튼으로클릭하고로봇 설정 옵션(RoboDK)을선택하십시오. 프로젝트 불러오기…를선택하고기본설정을선택하여샘플 RoboDK 스테이션을불러옵니다(이전섹션에표시된같은샘플프로젝트).
선택적으로객체이름을컴포넌트입력 (O)으로제공할수있습니다. 컴포넌트옵션에서프로젝트를지정하여원하는 RoboDK 프로젝트를각컴포넌트와함께사용할수도있습니다.
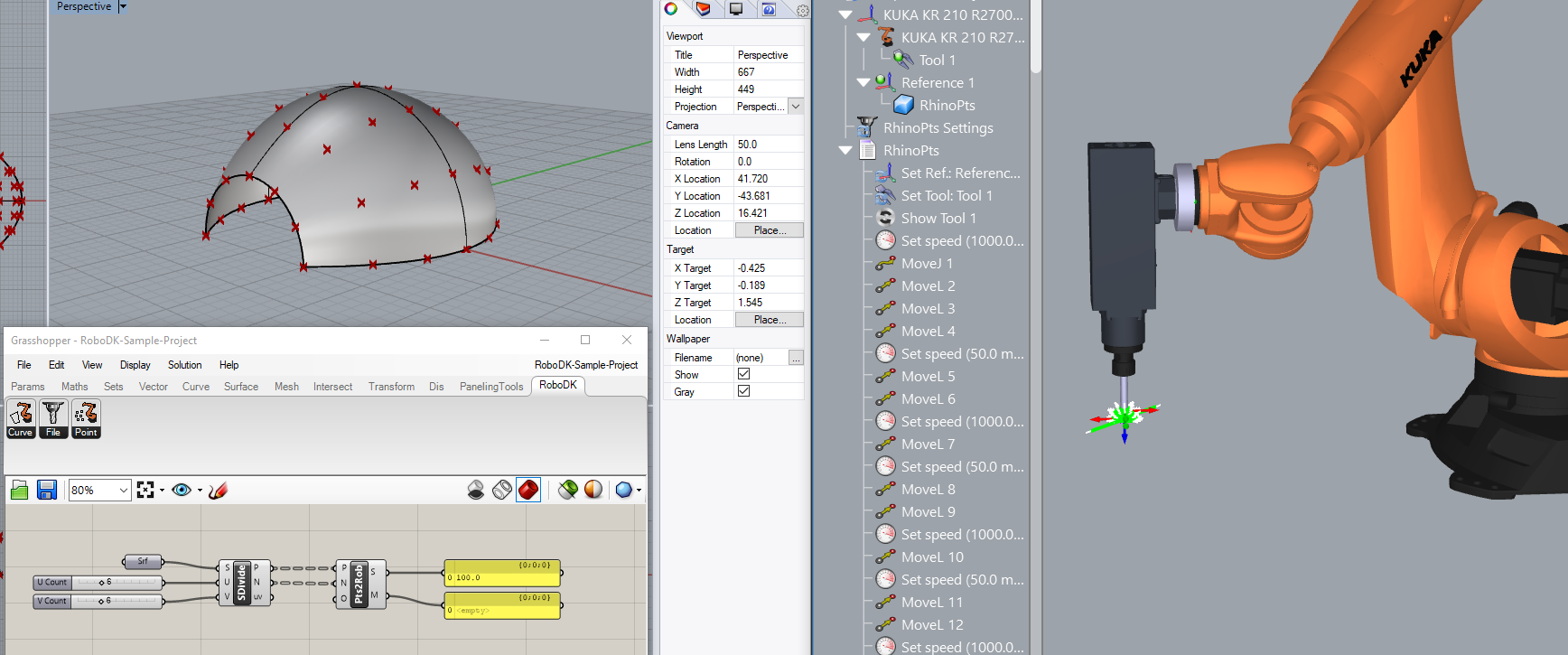
3.Grasshopper에서Solution➔Recomute (F5)를선택하여 RoboDK에서부품과프로그램을업데이트하십시오.
수동설치
RUI 자동설치프로그램을사용하는것이좋습니다. 이설치프로그램이실패하면다음단계에따라 Rhino 용 RoboDK 추가기능을수동으로설치할수있습니다.
다운로드Downloads:
1.Rhinoceros를다운로드하여설치하십시오.
2.RoboDK를다운로드하여설치하십시오.
3.Rhino용RoboDK 추가기능을직접또는Food4Rhino에서다운로드하십시오.
4.파일압축을해제하십시오.
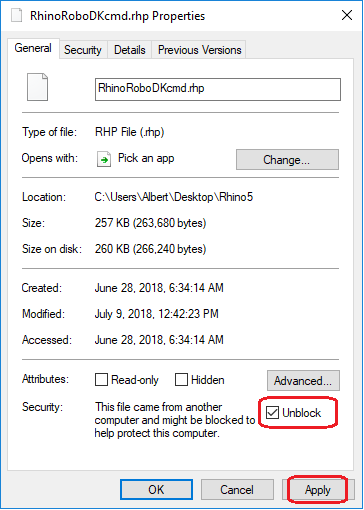
속성차단해제:
5.RhinoRoboDKcmd.rhp파일을마우스우측버튼으로클릭하고속성을선택하십시오.
6.차단 해제및적용을선택하십시오.
7.RhinoRoboDKgh.gha에대해 5 단계와6 단계를반복하십시오.
Rhino에 RoboDK 추가기능을로드하십시오:
8.Rhino 용 RoboDK 추가기능을불러오십시오. Rhino와함께RhinoRoboDKcmd.rhp파일을엽니다.
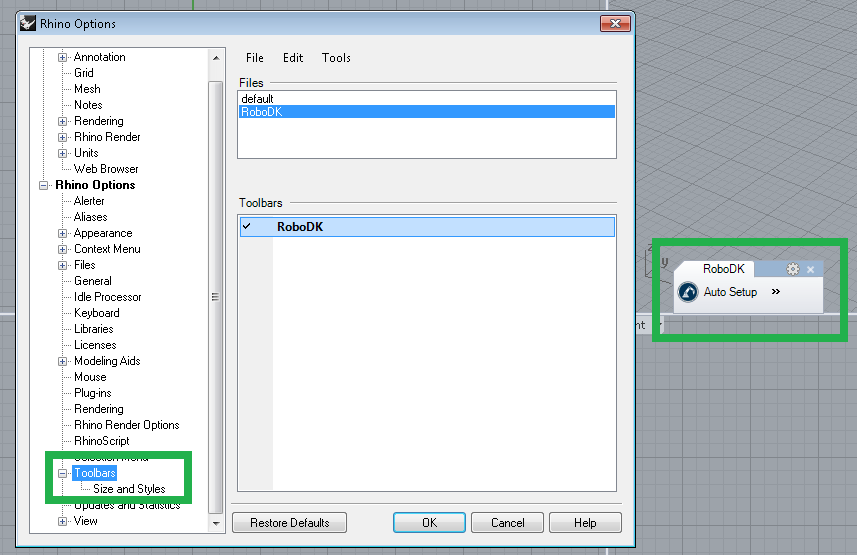
9.Rhino 용기본 RoboDK 도구모음을불러오십시오. Rhino와함께RhinoToolbar-Add-RoboDK.rui파일을엽니다.
10.RoboDK Grasshopper 구성요소를불러오십시오. Grasshopper를사용하여RhinoRoboDKgh.gha파일을엽니다 (Grasshopper 명령을입력하여 Grasshopper를엽니다).
Rhino를다시시작하십시오:
11.Rhino를닫았다가다시열어 Grasshopper 추가기능을확인하십시오.