프로펠러
이예제는샘플 RoboDK 스테이션을로드하고 (기본설정) 로봇과함께 SolidWorks에정의된일련의곡선을따르는방법을보여줍니다.
1.SolidWorks에서3개의블레이드프로펠러예를불러옵니다.
2.RoboDK 탭을선택하고설정
3.프로젝트 불러오기…를선택하십시오.
4.기본설정을선택하십시오. RoboDK는쿠카로봇, 하나의툴 (툴 1과같은스핀들) 및하나의기준좌표계 (좌표계 1)을사용하여샘플프로젝트를불러오고시작합니다.
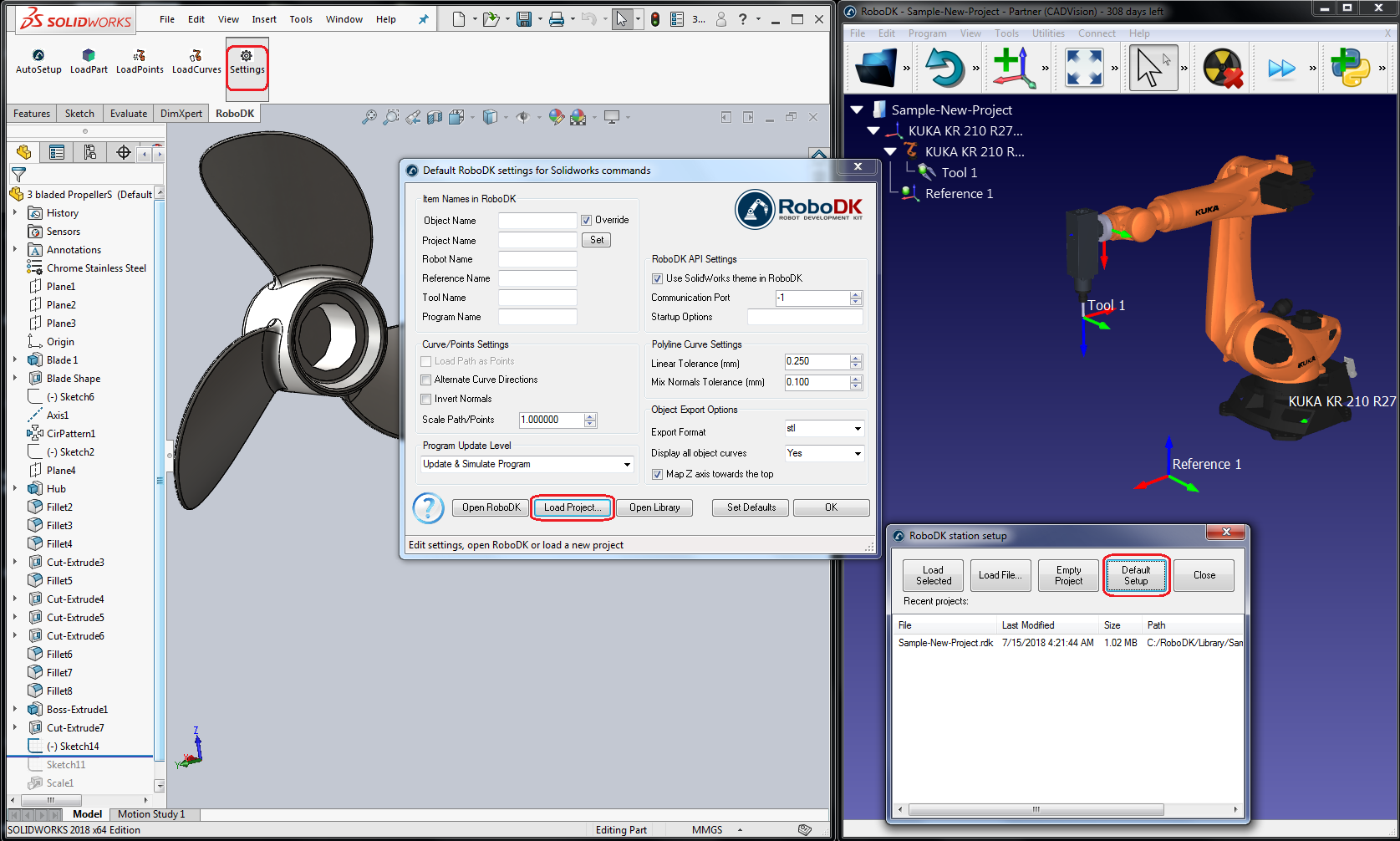
5.설정창을닫거나확인을선택하십시오.
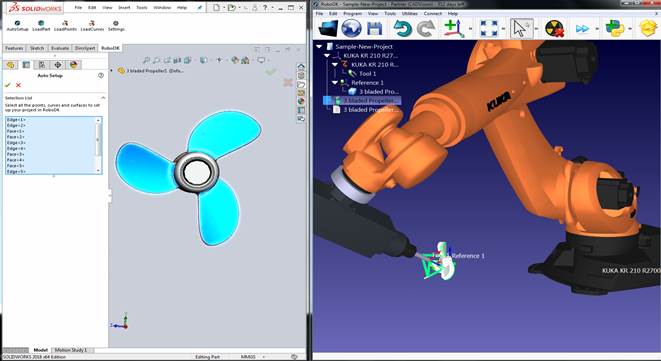
6.SolidWorks에서자동 설정
7.모든커브와서피스를선택하고속성관리자페이지에서확인을누릅니다. 다음그림과같이프로젝트가 RoboDK에로드됩니다.
활성기준좌표계 (좌표계 1)에로드된부품과공구경로를따르는 RoboDK의새곡선추적프로젝트가표시됩니다.
접근경로가공구경로에수직인것을볼수있습니다. 로봇은아무런문제없이공구경로를따라움직일수있어야합니다.
RoboDK 트리에서
예를들어선호 공구 경로 표시를선택하여부품에대한공구의기본방향을보고수정할수있습니다. 공구회전경로 오프셋값을변경하여추가회전을정의하십시오. 이렇게하려면새값을입력하거나마우스휠을사용하여결과를빠르게미리볼수있습니다.
이설정을변경하기위한자세한정보는로봇 가공 섹션에서확인할수있습니다.
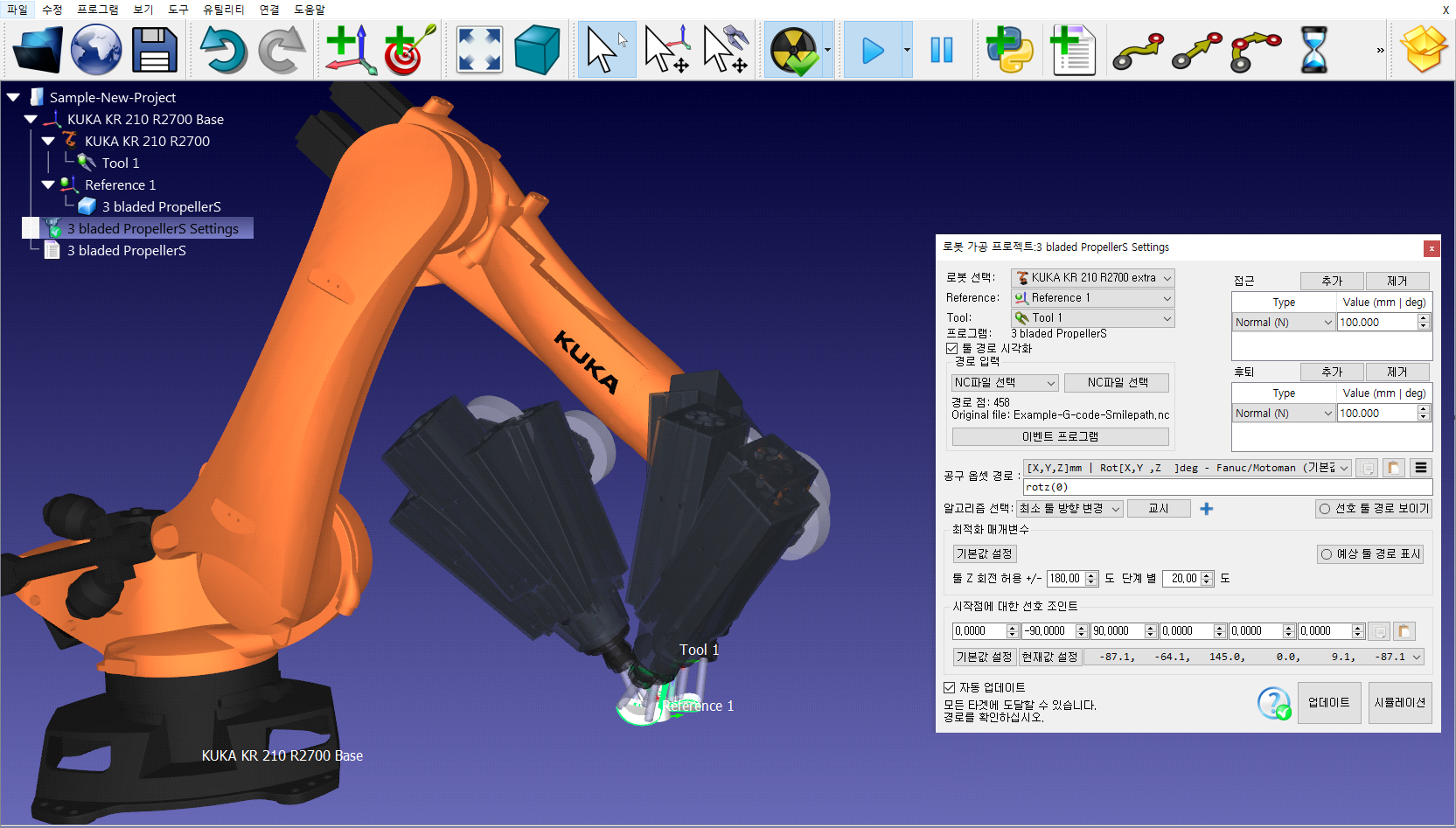
마지막으로시뮬레이션이원하는결과를생성하면프로그램을생성하거나시뮬레이션을내보낼수있습니다.
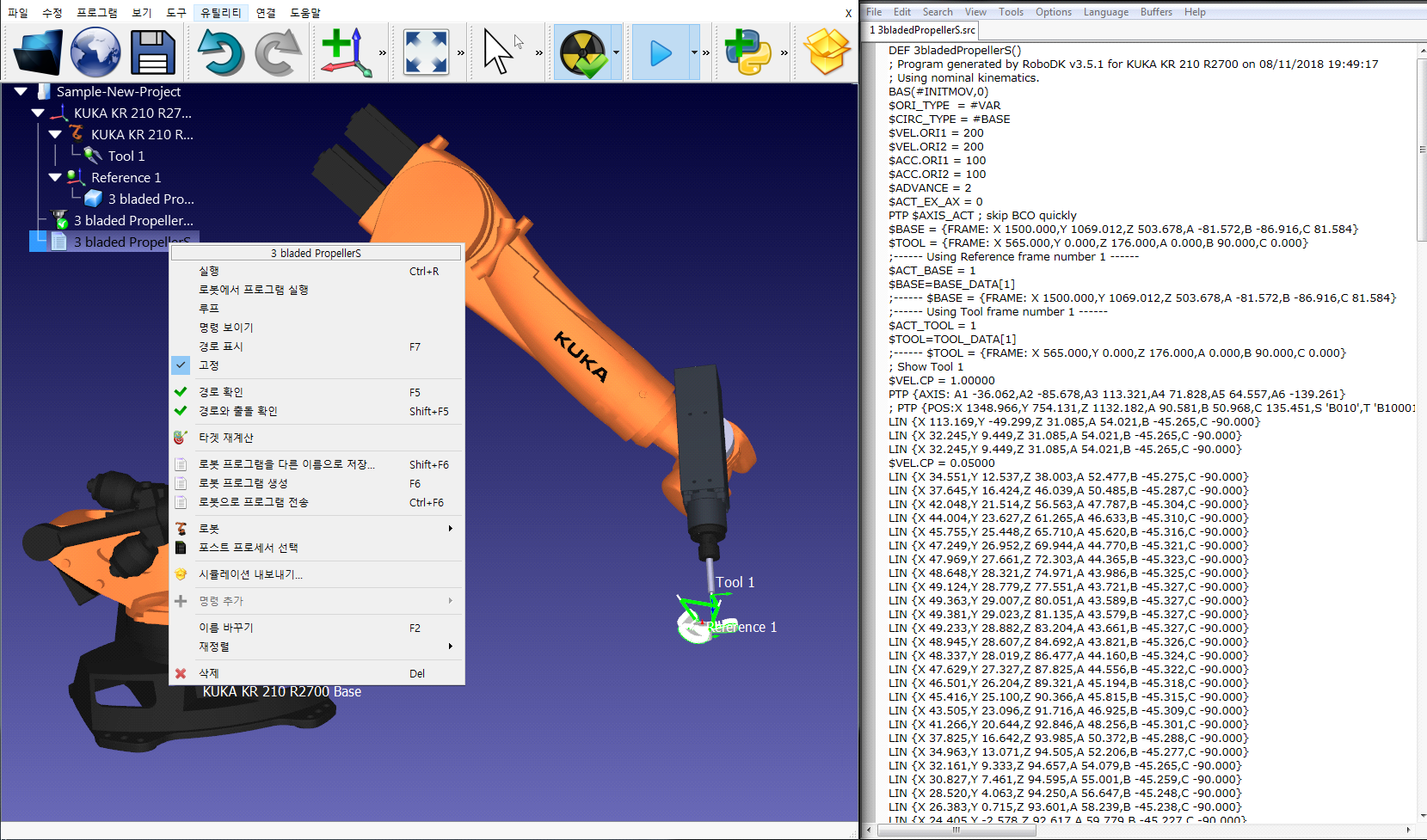
8.프로그램을마우스우측버튼으로클릭하십시오.
9.로봇 프로그램 생성 (F6)을선택하십시오. 로봇프로그램이생성되어표시됩니다.