RoboDK Plugin for hyperMILL
하이퍼밀 소개
OpenMind hyperMILL용 RoboDK add-in을사용하면 hyperMILL에서직접로봇가공프로젝트를빠르게설정할수있습니다. OpenMind 소프트웨어용 RoboDK 통합을통해 hyperMILL CAD/CAM 가공소프트웨어와 RoboDK를쉽게결합하여로봇가공을위한산업용로봇암을시뮬레이션하고프로그래밍할수있습니다.
이 hyperMILL add-in을사용하면로봇가공을위한오류없는프로그램을 hyperMILL에서직접쉽게생성할수있습니다. 또는 RoboDK는표준 APT CLS 및 G 코드가공파일도지원합니다.
로봇가공용 RoboDK에대한자세한내용은 로봇 가공 섹션에서 확인할수있습니다. 하이퍼밀과하이퍼캐드에대한자세한내용은 https:/www.openmind-tech.com/en.html 에서확인할수있습니다.
이문서에서는 hyperMILL 소프트웨어용 RoboDK 플러그인을설정하는방법과 RoboDK에서로봇가공프로젝트를설정하기위해 hyperMILL을사용하는방법을설명합니다.
하이퍼밀 설정
다음단계에따라 hyperMILL용 RoboDK Add-in을설치하세요.
1.플러그인을다운로드하세요
https://robodk.com/files/upload/hyperMILL_AddIn_RoboDK.zip
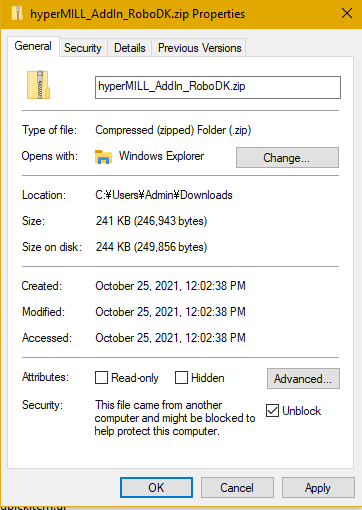
2.플러그인을안전으로표시: ZIP 폴더를마우스오른쪽버튼으로클릭하고속성을선택한다음차단해제옵션을선택합니다.
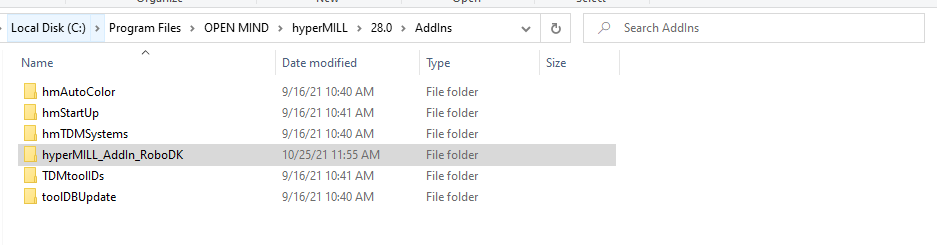
3.ZIP 폴더의내용을 "C:\Program Files\OPEN MIND\hyperMILL\28.0\AddIns" 또는이와동등한설치디렉토리에압축을풉니다.
플러그인폴더는다음이미지와같이표시되어야합니다.
하이퍼밀 워크플로
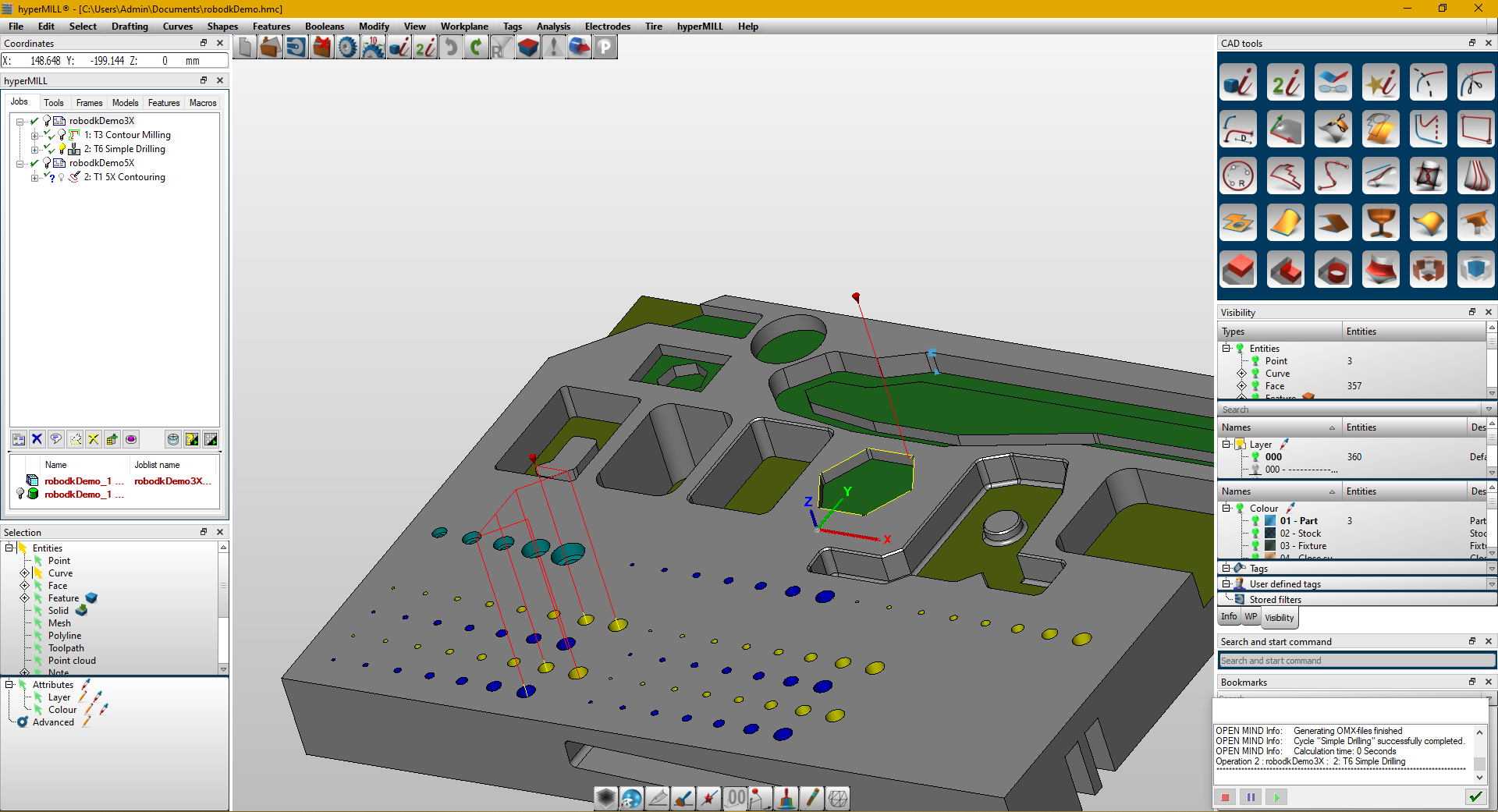
hyperMILL/hyperCAD-S에서는 RoboDK 플러그인을사용하여가공작업을 RoboDK로쉽게전송할수있습니다. 이를통해로봇가공을위한로봇을시뮬레이션하고프로그래밍할수있습니다.
다음단계에따라 hyperMILL/hperCAD-S에서로봇가공프로젝트를자동으로설정할수있습니다:
1.작업을마우스오른쪽버튼으로클릭합니다.
2.Add-in을선택합니다.
3.RoboDK Add-in을선택합니다.
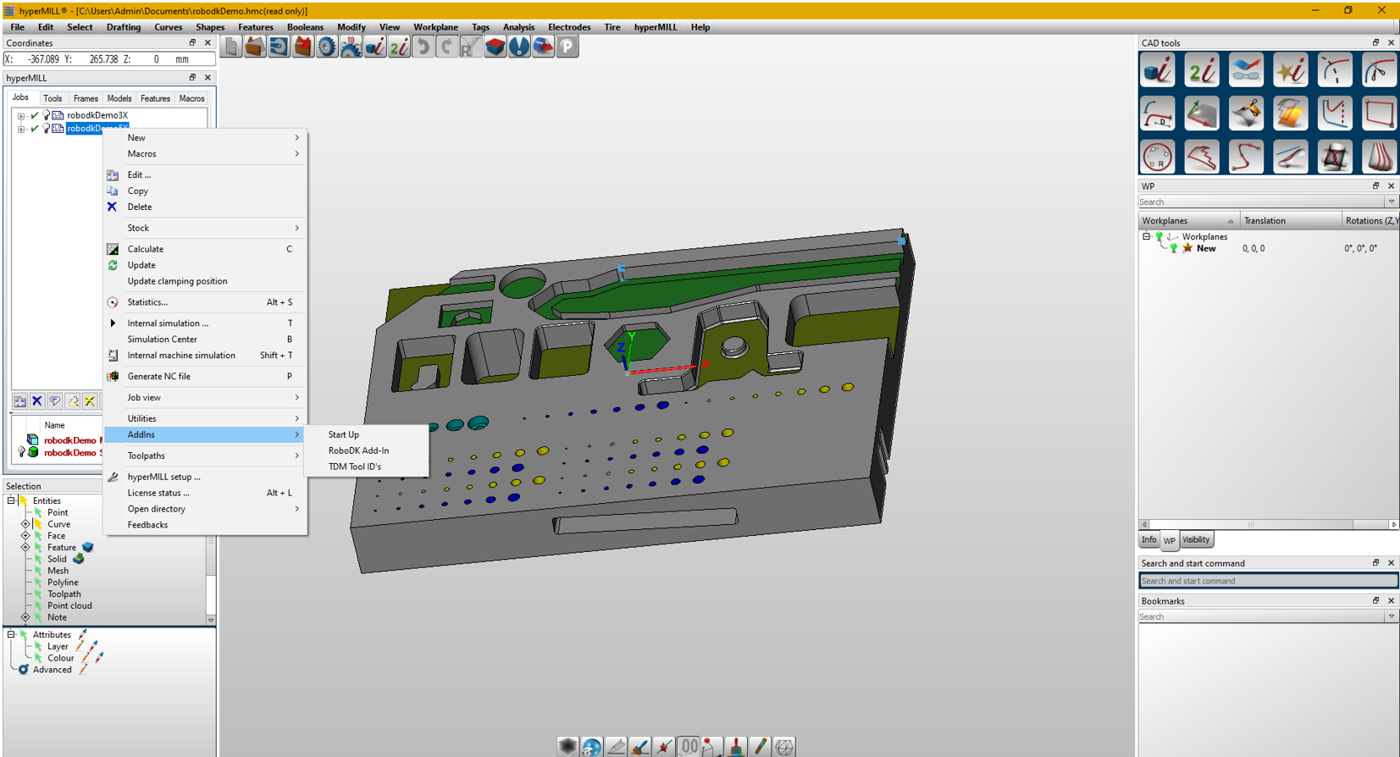
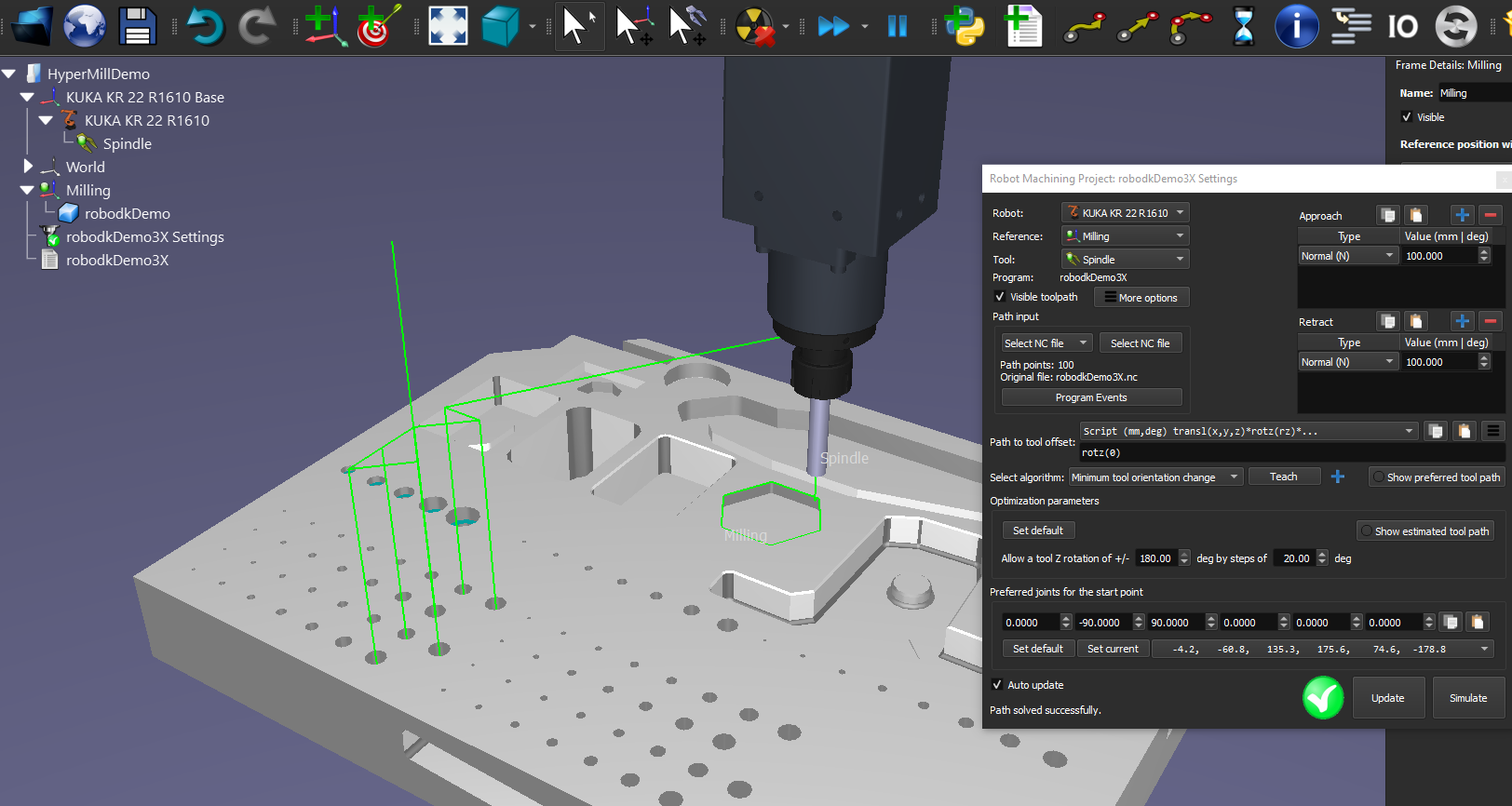
선택한로봇으로프로그램이실행가능한경우녹색확인표시가표시됩니다. 특이점, 축제한또는도달거리문제와같은문제가있는경우빨간색표시가문제메시지와함께표시됩니다.
로봇가공프로젝트
프로그램을마우스오른쪽버튼으로클릭하고실행을 선택하여시뮬레이션합니다(또는프로그램을두번클릭). 로봇 프로그램 생성(F6)을선택하여로봇컨트롤러에로드해야하는로봇프로그램을가져올수도있습니다. 로봇프로그램을생성하는방법에대한자세한내용은 오프라인 프로그래밍 섹션에서 확인할수있습니다.
필요한경우프로그램을마우스오른쪽버튼으로클릭하고포스트 프로세서 선택을 선택하여 포스트프로세서를변경합니다. 이단계는생성된코드의모양을사용자지정하는데도움이될수있습니다. 포스트프로세서선택및사용자지정에대한자세한내용은 포스트 프로세서 섹션에서 확인할수있습니다.