변경
이섹션에서는기존포스트프로세서를약간변경하는방법을보여줍니다. 대부분의포스트프로세서에는공급업체별로봇프로그래밍기능을수정하거나활성화하기위해쉽게수정할수있는일부변수가있습니다.
예를들어기존 ABB 및쿠카포스트프로세서가다음과같이변경됩니다.
●관절각도정보를사용하여동작명령을생성하도록관절이동을설정합니다.
●최대속도를 500 mm/s로재정의하십시오. 로봇이더빨리움직이도록프로그램되어있어도속도는포스트프로세서에서 500 mm/s로제한됩니다.
●각프로그램을별도의파일로생성하고프로그램이프로그램당최대3000줄의코드를갖도록합니다. 큰프로그램은작은프로그램으로나누어차례로호출됩니다.
이전섹션에서는기존포스트프로세서를열어편집하는방법을보여줍니다.
1.프로그램 ➔ 포스트 프로세서 추가 / 편집을선택하십시오.
2.포스트프로세서를선택하십시오. 예를들어, 쿠카 KRC4의경우쿠카_KRC4를선택하십시오.
3.확인을선택하십시오. 포스트프로세서는파이썬 IDLE 편집기에표시됩니다.
다음섹션에서는텍스트편집기(또는파이썬 IDLE)에서제안된변경을수행하는방법을보여줍니다.
조인트 각도를 사용하여 움직임을 부과
다음단계는조인트각도를사용하여축방향이동을강제하기위해기존포스트프로세서를수정하는방법을보여줍니다. 이예에서는 ABB IRC5 로봇컨트롤러에이변경사항을적용하는방법을보여줍니다.
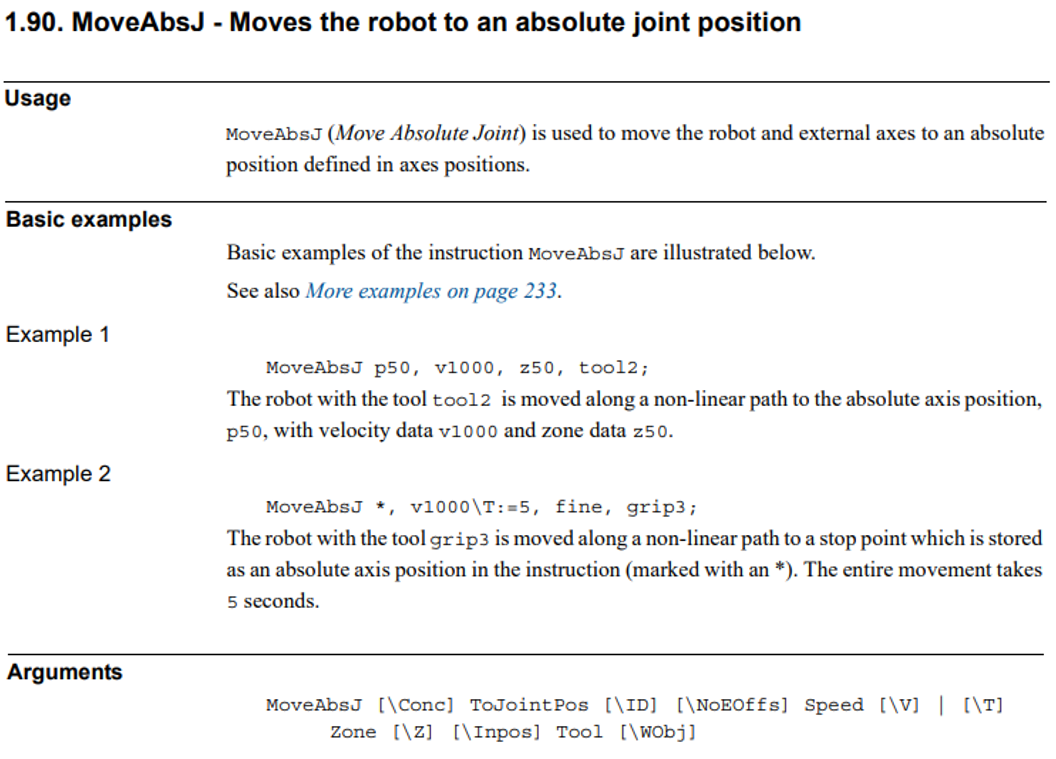
1.특정로봇컨트롤러의프로그래밍매뉴얼을찾으십시오. 이예에서는 ABB IRC5 RAPID 프로그래밍매뉴얼을사용합니다.
2.조인트운동지침을찾으십시오. 이경우 ABB의절대관절이동명령을MoveAbsJ라고합니다. 이명령에는조인트축을정의하는jointtarget 변수가필요합니다.
3.프로그램 ➔ 포스트 프로세서 추가 / 편집을선택하고현재수정하고있는포스트프로세서를선택하십시오. 현재사용자정의가능한포스트프로세서를사용중인경우기본적으로선택됩니다.
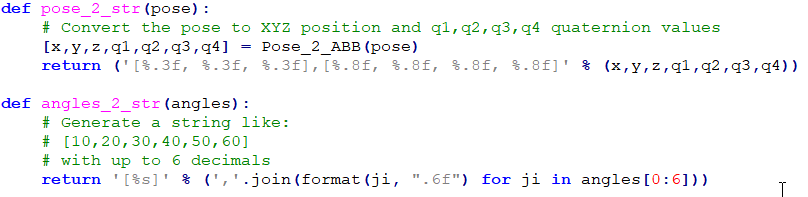
4.포스트프로세서내부에서MoveJ기능을찾아야합니다. 이기능은포스트프로세서가조인트동작명령을생성하는방식을정의합니다. 또는 RoboDK는선형이동에MoveL을사용합니다. 파이썬프로그래밍언어를사용하여다음이미지와같이관절각도정보를제공하도록프로그램파일에추가된행을수정하십시오.

5.마지막으로, 포스트프로세서가조인트각도또는포즈를문자열로변환하는방식을수정해야할수도있습니다. angles_2_str 및pose_2_str함수는조인트각도와포즈가각각텍스트로변환되는방식을정의합니다.
대부분의 RoboDK 포스트프로세서는조인트이동에조인트데이터를사용하고선형이동에직교좌표를사용합니다. 조인트좌표를지정하여조인트움직임으로일련의선형움직임에서항상첫번째점을시작하는것이좋습니다. 이것은잘못된로봇구성으로프로그램을시작하지않고특이점또는축제한에도달하지않도록합니다.
속도한계 제어
다음단계에따라 500 mm/s의속도제한을설정하고 RoboDK를사용하여더높은속도를설정하지마십시오. 이예에서는쿠카 KRC2 또는 KRC4 컨트롤러를사용한다고가정합니다.
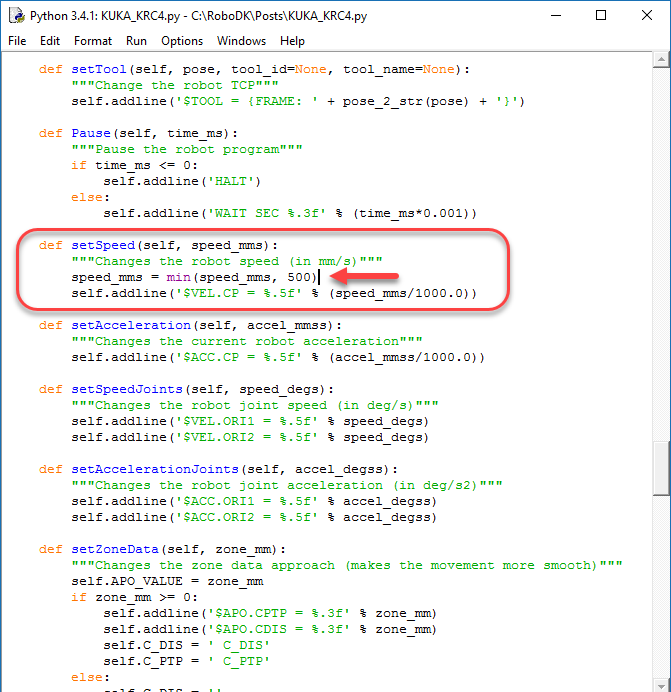
1.setSpeed함수정의를지정하십시오(def setSpeed).
2.속도를 m/s로변경하는 $VEL.CP 출력을생성하기전에다음코드를추가하십시오.
speed_mms = 분 (speed_mms, 500)
파일당 하나의 프로그램 생성
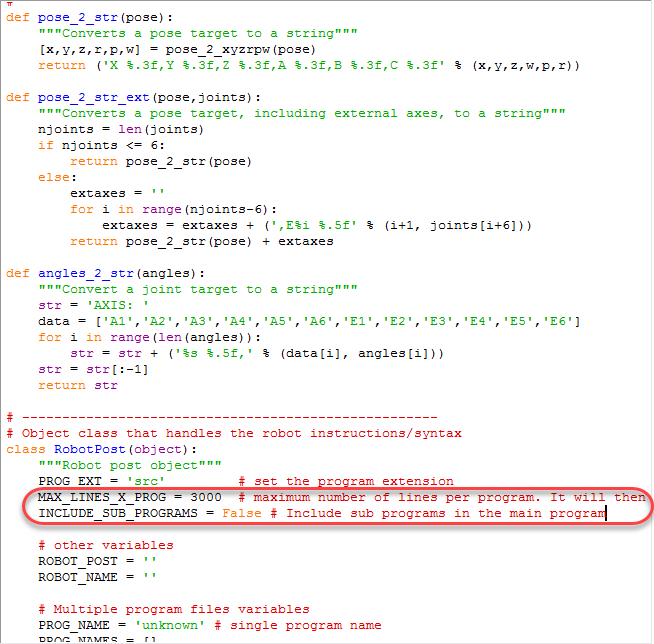
파일당둘이상의프로그램을추가하지않고최대3000줄의코드로프로그램을생성하려면다음변경사항을추가하십시오.
1.변수MAX_LINES_X_PROG를 3000으로설정하십시오.
2.INCLUDE_SUB_PROGRAMS변수를 False로설정하십시오.