조인트
다음단계는조인트각도를사용하여축방향이동을강제하기위해기존포스트프로세서를수정하는방법을보여줍니다. 이예에서는 ABB IRC5 로봇컨트롤러에이변경사항을적용하는방법을보여줍니다.
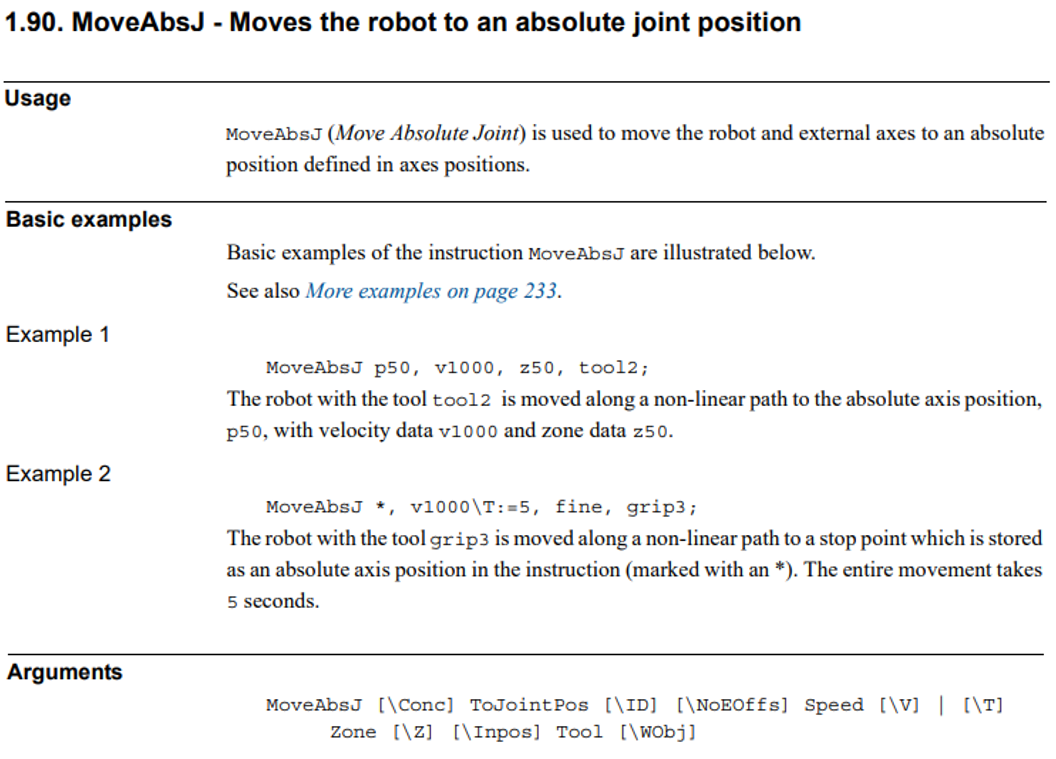
1.특정로봇컨트롤러의프로그래밍매뉴얼을찾으십시오. 이예에서는 ABB IRC5 RAPID 프로그래밍매뉴얼을사용합니다.
2.조인트운동지침을찾으십시오. 이경우 ABB의절대관절이동명령을MoveAbsJ라고합니다. 이명령에는조인트축을정의하는jointtarget 변수가필요합니다.
3.프로그램 ➔ 포스트 프로세서 추가 / 편집을선택하고현재수정하고있는포스트프로세서를선택하십시오. 현재사용자정의가능한포스트프로세서를사용중인경우기본적으로선택됩니다.
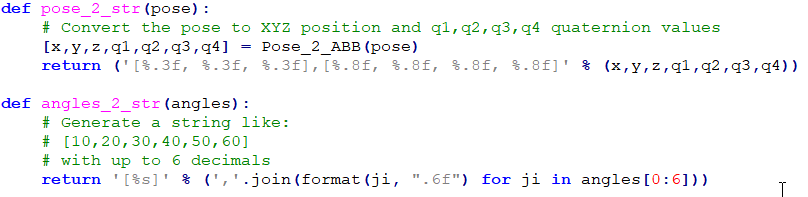
4.포스트프로세서내부에서MoveJ기능을찾아야합니다. 이기능은포스트프로세서가조인트동작명령을생성하는방식을정의합니다. 또는 RoboDK는선형이동에MoveL을사용합니다. 파이썬프로그래밍언어를사용하여다음이미지와같이관절각도정보를제공하도록프로그램파일에추가된행을수정하십시오.

5.마지막으로, 포스트프로세서가조인트각도또는포즈를문자열로변환하는방식을수정해야할수도있습니다. angles_2_str 및pose_2_str함수는조인트각도와포즈가각각텍스트로변환되는방식을정의합니다.
대부분의 RoboDK 포스트프로세서는조인트이동에조인트데이터를사용하고선형이동에직교좌표를사용합니다. 조인트좌표를지정하여조인트움직임으로일련의선형움직임에서항상첫번째점을시작하는것이좋습니다. 이것은잘못된로봇구성으로프로그램을시작하지않고특이점또는축제한에도달하지않도록합니다.
참고: 모든 RoboDK 포스트프로세서는기본적으로robodk.py모듈에연결됩니다. 이모듈에는많은로봇컨트롤러의포즈에서오일러각도로변환하는유용한도구가포함되어있습니다. 로봇컨트롤러에해당하는표기법을사용하십시오. 기준 좌표계및robodk.py모듈에서자세한정보를볼수있습니다.
참고: 둘이상의로봇제조업체가같은오일러각도표기법을사용할수있습니다. 예를들어, 화낙과모토맨은모두동일한 X➔Y➔Z 표기법을사용하고스토브리와메카데믹은동일한 X➔Y'➔Z '표기법을사용합니다.
중요: 포즈(예 : 직교좌표및오일러또는쿼터니언정보사용)를사용하여이동을지정하면로봇이도달하는위치는활성툴및기준좌표계에따라다릅니다. 프로그램에서공구및참조프레임의포즈를올바르게지정해야합니다. 이것은각각 setTool 및 setFrame 함수를통해수행됩니다.