속도한계
다음단계에따라 500 mm/s의속도제한을설정하고 RoboDK를사용하여더높은속도를설정하지마십시오. 이예에서는쿠카 KRC2 또는 KRC4 컨트롤러를사용한다고가정합니다.
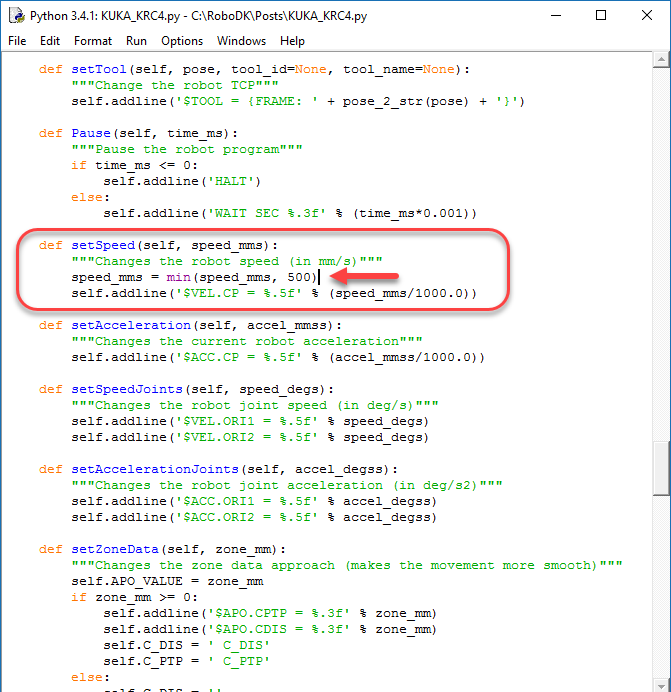
1.setSpeed함수정의를지정하십시오(def setSpeed).
2.속도를 m/s로변경하는 $VEL.CP 출력을생성하기전에다음코드를추가하십시오.
speed_mms = 분 (speed_mms, 500)
참고: 기본속도 200 mm/s는포스트프로세서상단의 HEADER 변수에정의되어있습니다($ VEL.CP = 0.2). 이기본속도는 RoboDK에서속도를수정하지않은경우에도변경할수있습니다.