리얼리스틱 로봇 시뮬레이션(RRS)
리얼리스틱로봇시뮬레이션(RRS)은정확한로봇시뮬레이션과사이클시간예측을제공하는표준입니다. 이 RRS 표준을통해오리지널컨트롤러소프트웨어를시뮬레이션및오프라인프로그래밍소프트웨어에통합할수있습니다.
RoboDK용 RRS add-in은기존 RoboDK 시뮬레이션및프로그램에정확한로봇경로와사이클시간을추가합니다. 이 RRS add-in을사용하면로봇제조업체의로봇컨트롤러소프트웨어(RCS) 모듈과직접인터페이스할수있습니다. RCS는기본적으로로봇제조업체의독점적인모션계획소프트웨어입니다.
RoboDK RRS add-in을사용하면 RoboDK 내에서정확한공구경로와사이클타임을생성하여로봇동작의매우정확한시뮬레이션을수행할수있습니다.
요구 사항
RoboDK에서RRS 지원을사용하려면먼저로봇제조업체에서 RCS 모듈을구입해야합니다. 이는일반적으로별도로판매되고활성화되는라이브러리(예: Windows의dll 파일)입니다.
로봇제조업체의 RCS 모듈은 C:\RoboDK\api\RRS\%BRAND%\에배치하는것이좋습니다. 그러나소스경로는 Add-in을통해지정할수있습니다.
RoboDK RRS 인터페이스
RoboDK는모든로봇제조업체 RCS의 RRS-1 구현에구성가능한 Python 인터페이스를제공합니다. 또한 RoboDK와 RRS 인터페이스간에상호작용하는데필요한유틸리티와베이스라인을제공합니다.
여러로봇제조업체의 RRS 구현은일관성이있어야하지만, 인터페이스에서제공하는기준은특정브랜드에따라약간의조정이필요할수있습니다. RoboDK는공급업체별 RRS 인터페이스구현을제공합니다.
RoboDK RRS for Comau (Add-in)
Comau용 RoboDK RRS는 Comau 로봇을위한특정 RoboDK Add-in입니다. RoboDK Add-in을설치하려면문서의 Add-in 섹션을참조하세요.
Comau에서필요한 RCS 모듈을획득하고활성화한후에는 RoboDK RRS for Comau Add-in 사용을시작할수있습니다.
RSS 프로그램을만들려면다음단계를따르세요:
1.프로그램으로 설정열기➔ RRS for Comau➔ 설정
a.로봇 ID를설정합니다. 일반적으로 0입니다.
b.로봇폴더의경로를설정합니다. 이폴더는일반적으로 .c5g, .CIO 및 .xml 파일이들어있는기본폴더입니다.
c.로봇파일의경로를설정합니다. 로봇폴더에포함된 .c5g 파일입니다.
d.RRS DLL 파일의경로(일반적으로 rcscomau.dll)를설정합니다.
2.프로그램을 마우스 오른쪽 버튼으로 클릭하여 RRS 프로그램 생성➔ RRS 프로그램 생성(Comau)
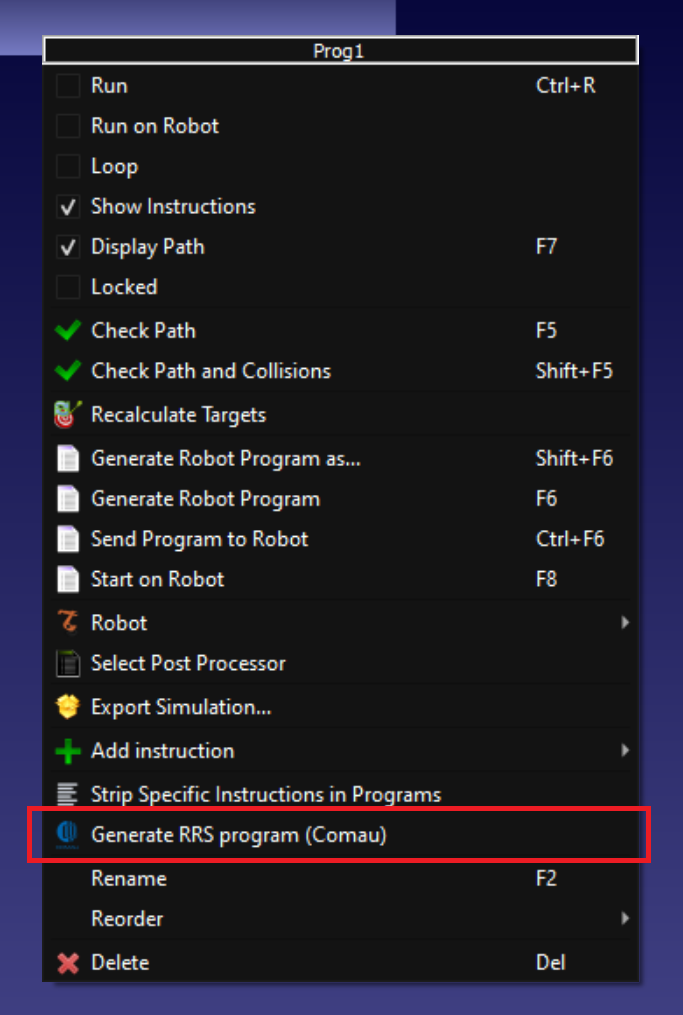
정확한조인트로새프로그램이생성되고프로그램이름에사이클시간예상이제공됩니다.