C#
로봇명령(예: MoveJ, MoveL 또는 setDO)을사용하면, C# 프로그램이기본적으로시뮬레이션됩니다. 샘플 C# 프로젝트가시작되면, 시뮬레이션모드도기본적으로선택됩니다.
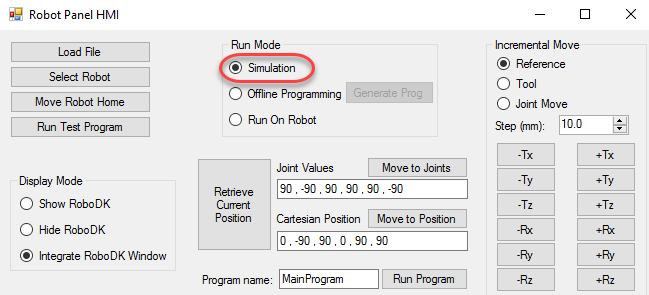
이는로봇이동이 RoboDK에서시뮬레이션됨을의미합니다. 예를들어, 오른쪽의버튼(+ Tx, -Tx,…)을선택하여10mm씩로봇을움직이거나로봇의현재위치를중심으로육각형움직임을실행하는테스트프로그램실행을선택할수있습니다.
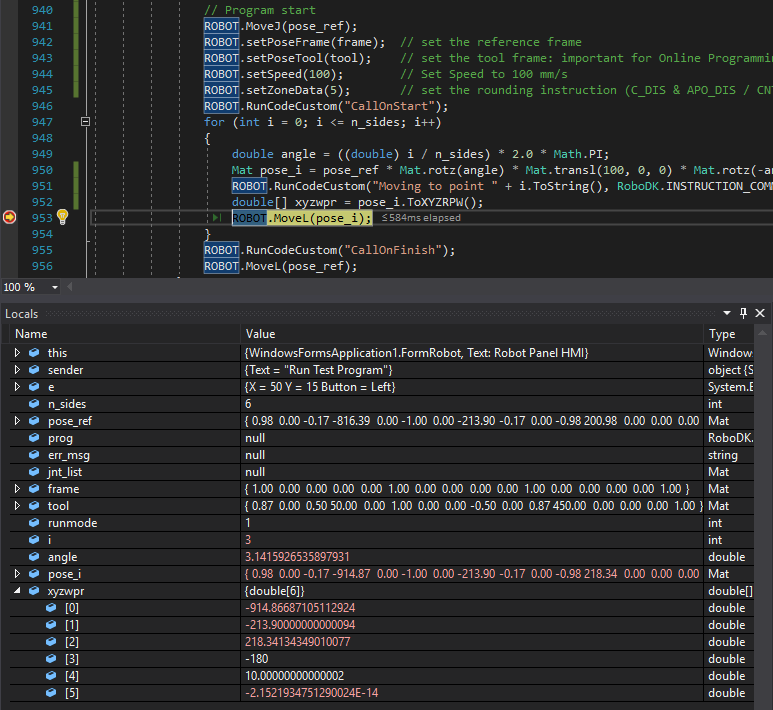
응용프로그램을디버깅하고로봇대상을검사하도록중단점을설정하십시오. 로봇타겟은조인트좌표또는 Mat 변수(4x4 자세매트릭스)로정의할수있으며, XYZWPR 형식으로검사하여프로그램문제를해결할수도있습니다. 기준 좌표계섹션에서추가적인내용을확인할수있습니다.
다음섹션에표시되는것과같이실행모드를오프라인 프로그래밍또는온라인 프로그래밍(로봇에서실행)으로변경할수도있습니다.C# OLP #CsAPIOLP
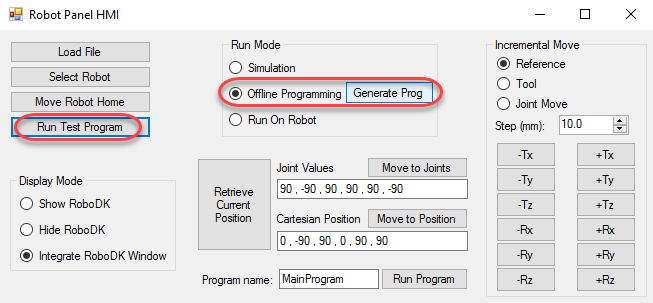
로봇시뮬레이션에사용되는것과같은 C# 코드를사용하여 C# 프로그램을오프라인에서생성할수있습니다(오프라인프로그래밍). 이기능을테스트하려면다음단계를수행하십시오.
1.실행모드섹션에서오프라인 프로그래밍을선택하십시오.
2.테스트 프로그램 실행이나다른이동명령의조합을선택하십시오.
3.로봇제조사별프로그램을얻기위해프로그램 생성을선택하십시오.
이경우, 프로그램은시뮬레이션되지않고로봇컨트롤러에특정한로봇프로그램을결과로얻기위해빠르게실행됩니다. 프로그램이생성되면, 실행모드가다시시뮬레이션으로변경됩니다.
팁:로봇을마우스오른쪽버튼으로클릭하고, 포스트 프로세서 선택을선택하여포스트 프로세서섹션에표시된것과같이오프라인프로그래밍을위해다른포스트프로세서를지정하십시오.
참고: 파이썬 OLP섹션에표시된것과같이, 오프라인프로그래밍모드가활성화되면로봇이실행모드를 RUNMODE_MAKE_ROBOTPROG로변경하므로로봇이움직이지않습니다.