매트랩
RoboDK 매트랩API는 RoboDK 설치폴더에서사용할수있습니다. 일반적으로 C:/RoboDK/Matlab/에서찾을수있습니다. RoboDK 매트랩 API는일련의m 파일로제공됩니다.
매트랩은MathWorks에서개발된상용프로그래밍언어입니다. 매트랩은매트릭스조작, 함수및데이터가시화및알고리즘구현을제공합니다.
이문서의메인 섹션에서는로봇프로그래밍을위해매트랩과같이널리사용되는프로그래밍언어와함께 RoboDK API를사용하는이점을소개합니다.
RoboDK 매트랩 API에는다음이포함됩니다:
●Robolink.m은 RoboDK와인터페이스하는클래스입니다. RoboDK 스테이션트리의모든객체는 Robolink 객체를사용하여검색될수있으며, RobolinkItem 객체(파이썬의Robolink클래스와동일)로표시됩니다.
●RobolinkItem.m은스테이션트리에서 RoboDK 항목을나타내는클래스입니다. 해당항목에대해다른작업을수행할수있습니다(파이썬의Robolink.Item클래스와동일).
●transl.m, rotx.m, roty.m 및 rotz.m은 XYZ 평행이동벡터또는특정축을따라회전한경우의자세행렬을작성하는함수입니다.
●Pose_2_XYZRPW.m과 XYZRPW_2_Pose.m을사용하면자세를 XYZ 위치로, RPW 오일러각도로또는그반대로변환할수있습니다. 기준 좌표계섹션에자세한정보가있습니다.
샘플코드는다음페이지에서제공됩니다:
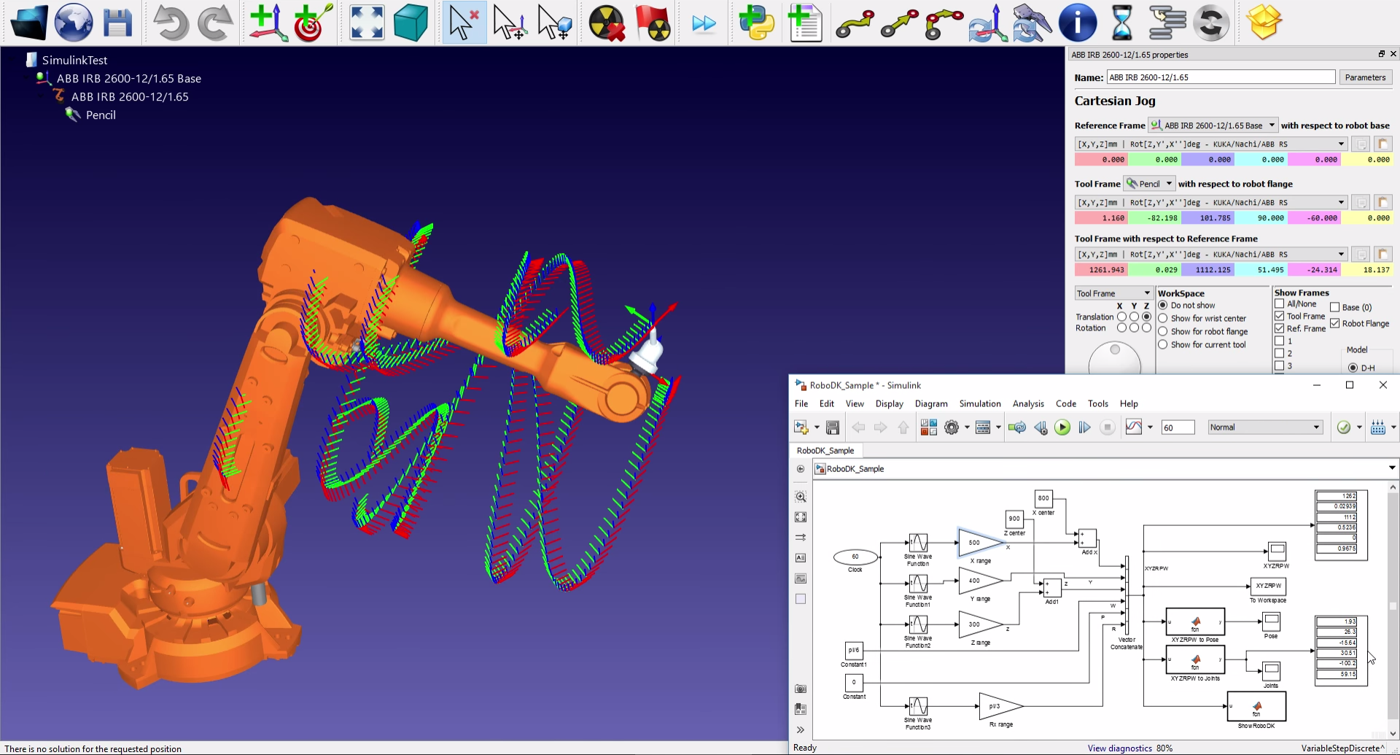
시뮬링크 예제
시뮬링크프로젝트를예로들어소개합니다. 시뮬레이션에서로봇은임의로생성된일련의XYZ 좌표를따라이동합니다.
다음비디오는시뮬레이션실행결과를보여줍니다: https://www.youtube.com/watch?v=7DDBMwa0-Oc