파이썬
파이썬은범용프로그래밍을위해널리사용되는고급프로그래밍언어입니다. Python은보다빠르게작업하고시스템을보다효과적으로통합할수있는프로그래밍언어입니다. 파이썬의구문을통해프로그래머는다른언어에비해적은수의코드줄로개념을표현할수있어친숙하고배우기쉽습니다.
이전 섹션에서는파이썬과같은로봇프로그래밍에널리사용되는프로그래밍언어와함께 RoboDK API를사용하는장점에관해설명하였습니다.
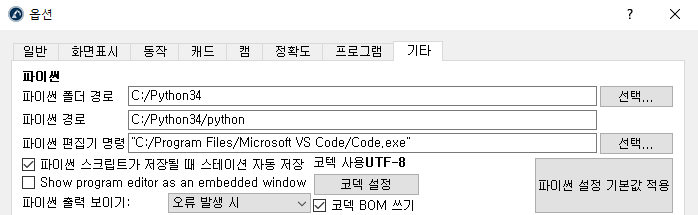
파이썬은기본적으로 RoboDK와함께자동설치및통합됩니다. 도구➔옵션➔기타를선택하여기본설정 (파이썬경로및파이썬편집기)을변경하십시오.
파이썬 RoboDK API는다음두모듈로나뉩니다.
●robolink모듈(robolink.py): robolink 모듈은 RoboDK와파이썬사이의인터페이스입니다. RoboDK 스테이션트리의모든객체는 Robolink 객체를사용하여검색할수있으며, 검색결과는Item객체로표시됩니다. Robolink.Item 클래스에따라해당항목에서다른작업을수행할수있습니다.
●robodk모듈(robodk.py): robodk 모듈은파이썬을위한로봇공학툴박스로써자세변환을계산하고다른업체의로봇들의오일러각도를얻을수있습니다. 모든포스트프로세서는이robodk모듈을기반으로합니다.
파이썬모듈은 C:/RoboDK/Python/ 폴더에있으며, RoboDK를설치하거나파이썬 설정 기본값 적용을선택하면자동으로파이썬폴더경로에복사됩니다(이전이미지참조).
다음하위섹션은각각시뮬레이션, 오프라인프로그래밍및온라인프로그래밍을위한간단한프로그램을만드는방법을보여줍니다. RoboDK 파이썬 API페이지에서더많은예제를찾을수있습니다. 또한, RoboDK 라이브러리가 C:/RoboDK/Library/Macros/ 폴더에샘플파이썬매크로와함께제공됩니다.
파이썬 시뮬레이션
UR 로봇을사용하여샘플프로젝트를설정하고로봇과움직임을시뮬레이션하기위해다음단계를수행하십시오.
1.파일➔
2.UR10을불러오세요.
3.파일➔
4.Paint_gun.tool을불러오세요.
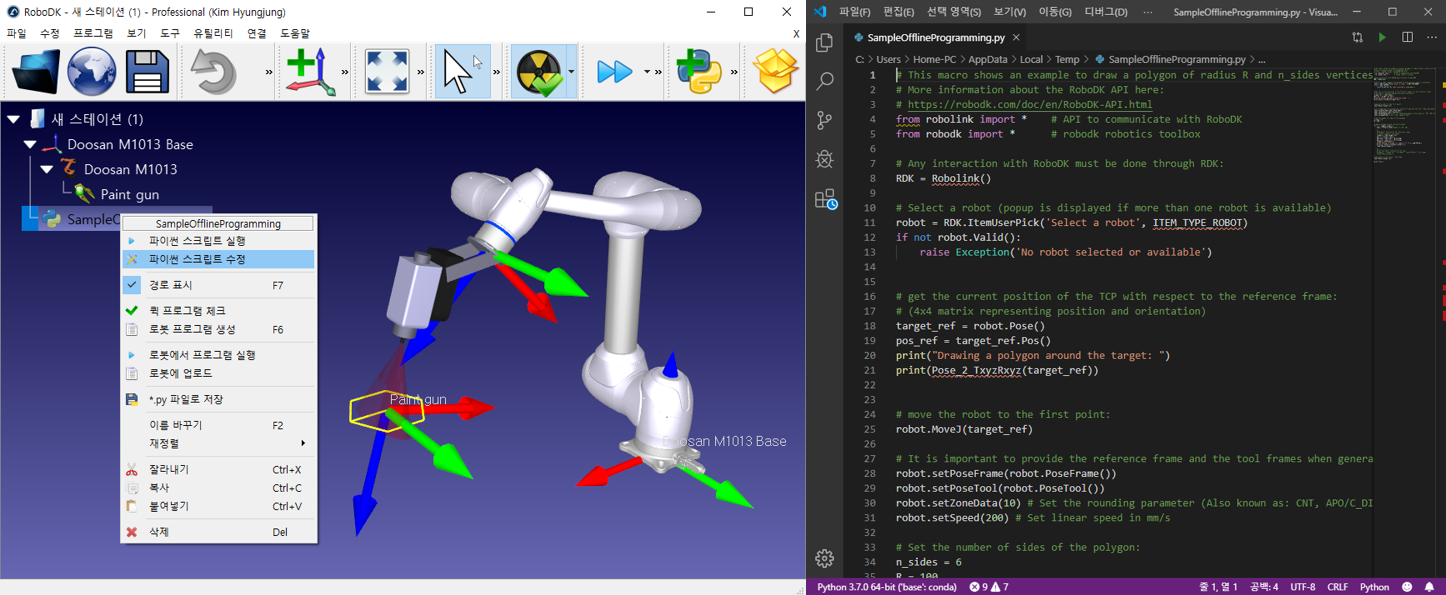
5.C:/RoboDK/Library/Macros/ 폴더에서샘플파이썬프로그램SampleOfflineProgramming.py를불러오십시오.

6.SampleOfflineProgramming항목을두번클릭하여시뮬레이션을실행하십시오. 로봇은현재위치주위에육각형을그려야하며 TCP의경로는노란색으로표시됩니다.
또는, 마우스오른쪽버튼으로프로그램을클릭하고
7.마우스오른쪽버튼으로
SampleOfflineProgramming 매크로는로봇기준좌표계를기준으로로봇의현재위치에서 n_sides 개의측면을갖고반경이 R인다각형을그립니다. 원하는경우, 다각형치수를변경하여로봇을다른위치로이동하고프로그램을다시실행하십시오.
이예제는웹사이트의오프라인 프로그래밍섹션 (비디오포함)에표시된프로그램과유사합니다.
파이썬 OLP
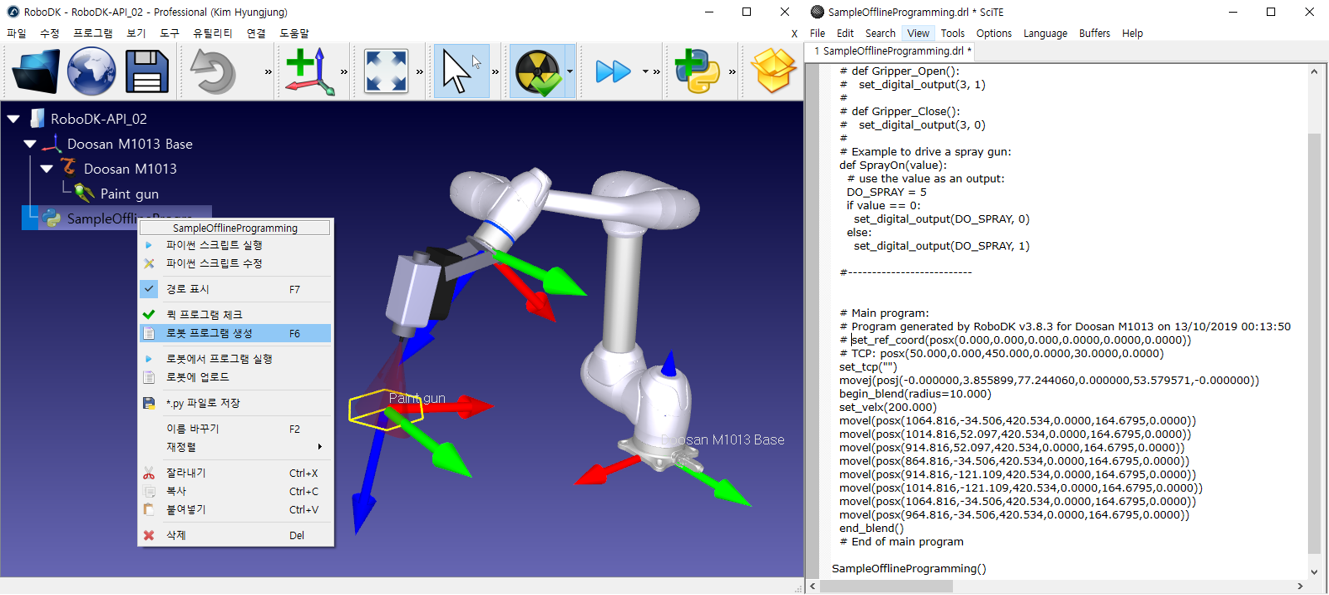
파이썬프로그램은로봇을시뮬레이션하는데사용된것과같은파이썬코드를사용하여오프라인으로생성될수있습니다 (이전파이썬 시뮬레이션섹션에표시됨). 오프라인프로그래밍을사용하면특정로봇컨트롤러에서실행할수있는로봇프로그램을생성할수있습니다.
1.
2.로봇 프로그램 생성(F6)을선택하십시오.
이경우프로그램은시뮬레이션되지않고로봇컨트롤러에특정한로봇프로그램인결과를얻기위해빠르게실행됩니다.
RDK = Robolink()
RDK.setRunMode(RUNMODE_MAKE_ROBOTPROG)
파이썬 온라인 프로그래밍
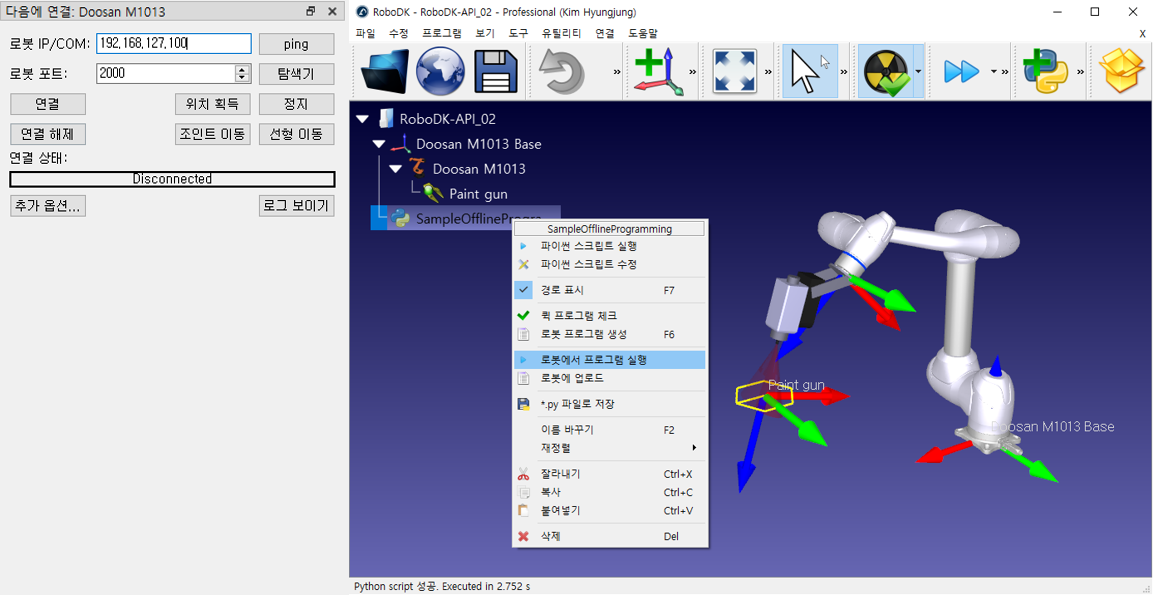
파이썬프로그램은파이썬 시뮬레이션섹션에보인것과같이로봇시뮬레이션에사용된것과같은파이썬코드를사용하여로봇에서직접실행할수있습니다. 온라인프로그래밍에서로봇드라이버를사용하여특정로봇컨트롤러에서일반프로그램을실행할수있습니다.
1.
2.로봇에서 실행을선택하십시오.
프로그램은파이썬프로그램이실행될때와같이로봇에서실행됩니다.
RDK = Robolink()
RDK.setRunMode(RUNMODE_RUN_ROBOT)