파이썬
UR 로봇을사용하여샘플프로젝트를설정하고로봇과움직임을시뮬레이션하기위해다음단계를수행하십시오.
1.파일➔
2.UR10을불러오세요.
3.파일➔
4.Paint_gun.tool을불러오세요.
5.C:/RoboDK/Library/Macros/ 폴더에서샘플파이썬프로그램SampleOfflineProgramming.py를불러오십시오.
팁: 시작하기섹션에서 RoboDK 스테이션을설정하기위한추가정보를확인할수있습니다.
팁:프로그램➔새파이썬프로그램을생성하기위해
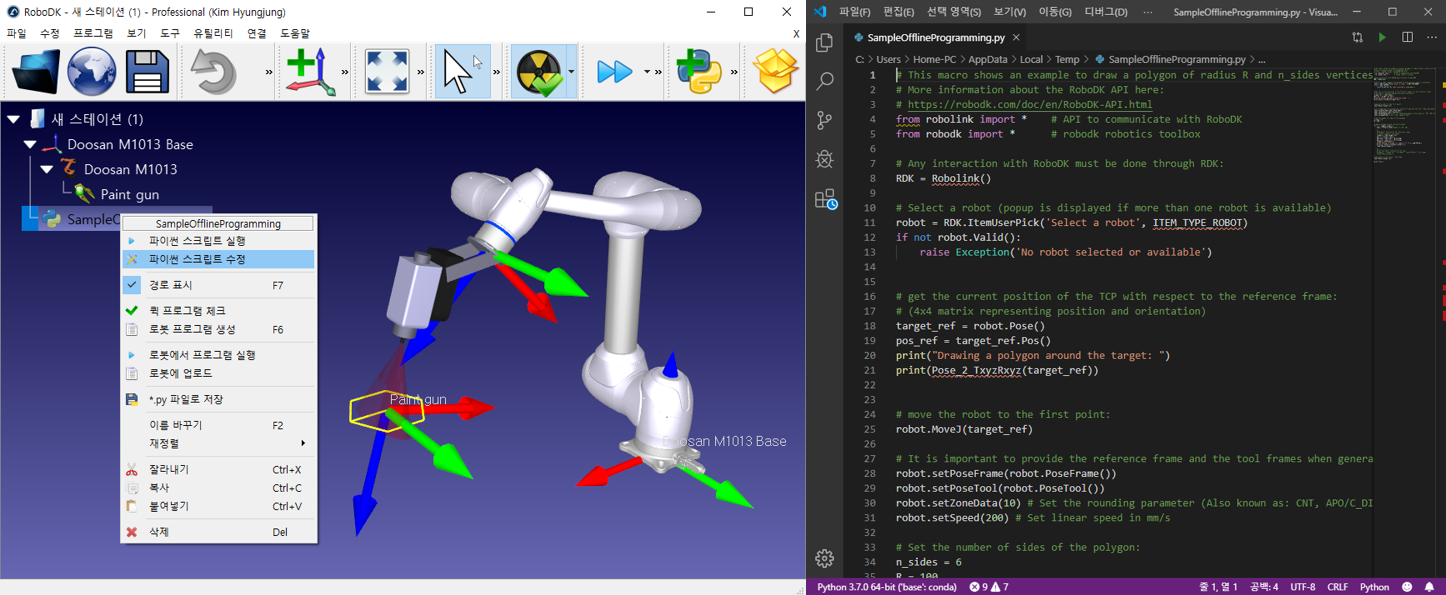
6.SampleOfflineProgramming항목을두번클릭하여시뮬레이션을실행하십시오. 로봇은현재위치주위에육각형을그려야하며 TCP의경로는노란색으로표시됩니다.
또는, 마우스오른쪽버튼으로프로그램을클릭하고
7.마우스오른쪽버튼으로
SampleOfflineProgramming 매크로는로봇기준좌표계를기준으로로봇의현재위치에서 n_sides 개의측면을갖고반경이 R인다각형을그립니다. 원하는경우, 다각형치수를변경하여로봇을다른위치로이동하고프로그램을다시실행하십시오.
이예제는웹사이트의오프라인 프로그래밍섹션 (비디오포함)에표시된프로그램과유사합니다.
팁:실행➔실행을선택하여, 파이썬편집기에서프로그램을실행할수있습니다. 모든인쇄명령또는오류를보여주는새창이나타납니다.