RoboDK CNC
RoboDK CNC를사용하면로봇컨트롤러에대용량프로그램을공급할수있습니다.
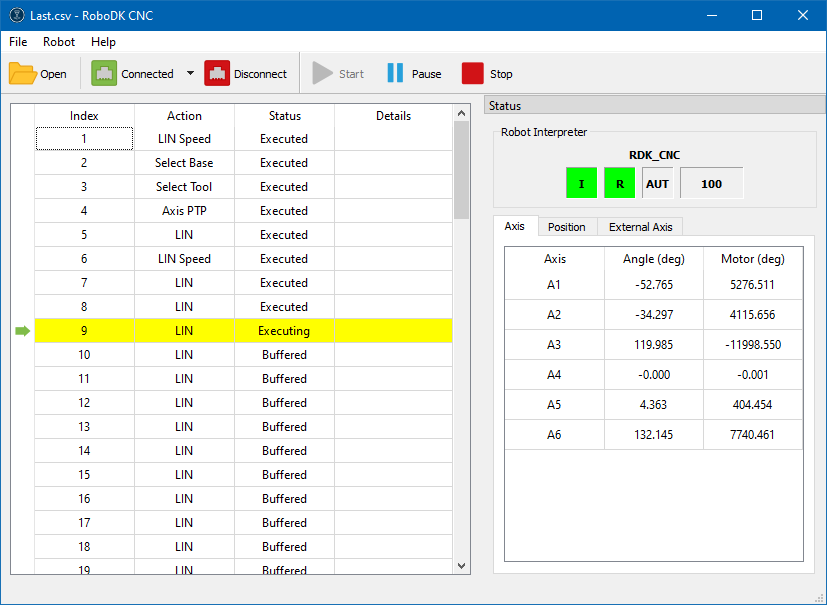
RoboDK CNC의기본창에는다음과같은요소가포함되어있습니다:
1.메인메뉴
2.도구모음
3.지침표
4.상태패널
주메뉴와도구모음작업은겹칩니다.
| 열기 | 를 사용하여 생성된 CSV 파일을 엽니다 e RoboDK CNC 포스트 프로세서 . |
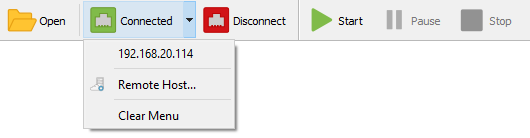
| 연결 | 이 아이콘은 현재 로봇 제어 시스템에 연결되어 있지 않음을 나타냅니다. 이 버튼을 누르면 연결 기록 메뉴가 열립니다. |
| 원격 호스트... | 이 작업을 수행하면 원격 로봇 제어 시스템의 IP 주소와 포트에 연결할 수 있는 새 연결 대화 상자가 나타납니다. |
| 연결 | 이 아이콘은 로봇 제어 시스템에 연결하려는 시도를 나타냅니다. |
| 연결됨 | 이 아이콘은 로봇 제어 시스템에 성공적으로 연결되었음을 나타냅니다. |
| 연결 해제 | 이 동작은 로봇 제어 시스템에 대한 연결을 즉시 중단합니다. RoboDK CNC 연결이 끊어진 후에도 로봇이 계속 움직일 수 있으니 주의하세요. |
| 시작 | 첫 번째 명령으로 로봇의 동작을 수행하기 시작합니다. 또는 이전에 시작한 프로그램을 계속 실행합니다. |
| 일시 중지 | 이전에 시작한 프로그램의 실행을 일시 중단합니다. |
| 중지 | 프로그램 실행을 취소하고 로봇의 움직임을 중지합니다. |









상태 패널에는 현재 실행 중인 KRL 프로그램, 준비 상태 및 속도 오버라이드 표시기, 현재 로봇 위치에 대한 정보가 포함되어 있습니다.
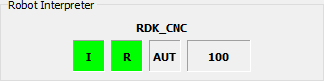
로봇 통역사 패널에는 네 가지 표시기가 있습니다:
로봇 드라이브 및 모션 |
| 로봇의 드라이브가 켜지고 로봇이 움직일 준비가 되었습니다. |
| 로봇 액추에이터가 꺼져 있고 로봇을 작동할 준비가 되지 않았습니다. | |
KRL 프로그램 현황 |
| 로봇 프로그램이 로드되지 않았습니다. |
| 로봇 프로그램이 로드되어 실행할 준비가 되었습니다. | |
| 로봇 프로그램이 실행 중입니다. | |
| 로봇 프로그램이 오류로 인해 중단되었습니다. | |
| 로봇 프로그램이 완전히 실행되었습니다. | |
로봇 컨트롤러 모드 |
| 로봇 제어 시스템의 현재 작동 모드입니다. 다음 값을 사용할 수 있습니다: T1, T2, AUT, EXT. |
속도 오버라이드 |
| 프로그램 실행 속도 오버라이드 값은 0에서 100 사이의 퍼센트 단위입니다. |








