RoboDK CNC
RoboDK CNC는로봇을 CNC처럼쉽게사용할수있는도구모음입니다. RoboDK CNC를사용하면스트리밍모드에서최대라인수까지대용량프로그램을무제한으로실행할수있습니다. 대규모프로그램은일반적으로 CAD/CAM 시스템을사용하고로봇을사용하여가공할때발생합니다.
대부분의로봇제어시스템은리소스가매우제한되어있어대용량프로그램을메모리에로드할수없습니다. RoboDK CNC는이러한좌표를하나씩또는하위프로그램그룹으로제어시스템에전송(드립피딩이라고도함)하여이러한제한을제거합니다.
RoboDK는 KUKA 로봇컨트롤러에서대형로봇가공프로젝트를실행할수있는전용 add-in(RoboDK CNC)을제공합니다. RoboDK는또한이전략을구현하기위해일부컨트롤러를위한전용포스트프로세서도제공합니다.
RoboDK CNC Add-in
이미Add-In Manager 플러그인이설치된 RoboDK가있는경우, RoboDK 온라인 라이브러리에서 추가기능을설치하기만하면됩니다.
로봇제어시스템에C3 브리지인터페이스서버를설치해야합니다. 이에대한자세한내용은KUKA용 RoboDK 드라이버를 참조하세요.
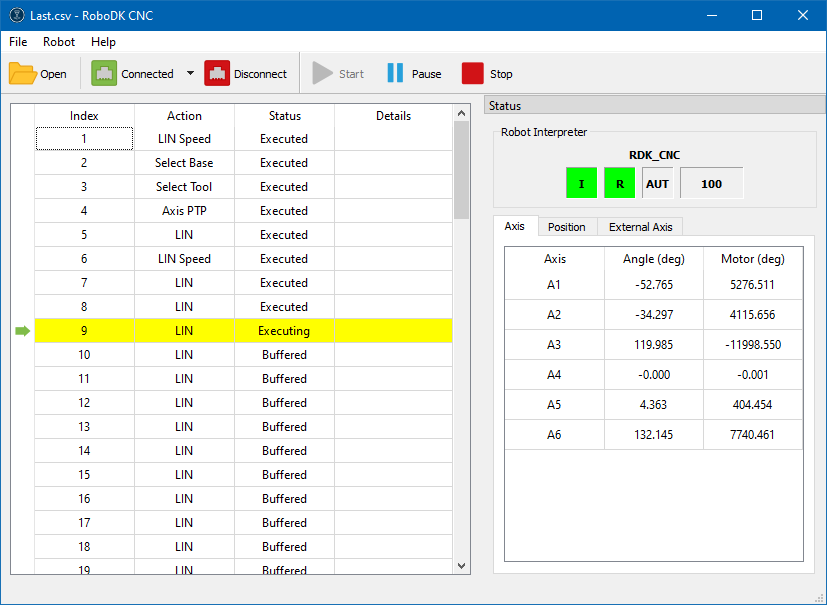
RoboDK CNC 사용자 인터페이스
RoboDK CNC를사용하면로봇컨트롤러에대용량프로그램을공급할수있습니다.
RoboDK CNC의기본창에는다음과같은요소가포함되어있습니다:
1.메인메뉴
2.도구모음
3.지침표
4.상태패널
주메뉴와도구모음작업은겹칩니다.
| 열기 | 를 사용하여 생성된 CSV 파일을 엽니다 e RoboDK CNC 포스트 프로세서 . |
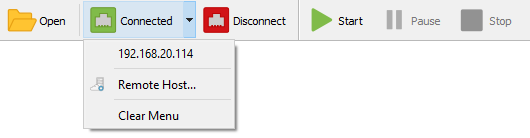
| 연결 | 이 아이콘은 현재 로봇 제어 시스템에 연결되어 있지 않음을 나타냅니다. 이 버튼을 누르면 연결 기록 메뉴가 열립니다. |
| 원격 호스트... | 이 작업을 수행하면 원격 로봇 제어 시스템의 IP 주소와 포트에 연결할 수 있는 새 연결 대화 상자가 나타납니다. |
| 연결 | 이 아이콘은 로봇 제어 시스템에 연결하려는 시도를 나타냅니다. |
| 연결됨 | 이 아이콘은 로봇 제어 시스템에 성공적으로 연결되었음을 나타냅니다. |
| 연결 해제 | 이 동작은 로봇 제어 시스템에 대한 연결을 즉시 중단합니다. RoboDK CNC 연결이 끊어진 후에도 로봇이 계속 움직일 수 있으니 주의하세요. |
| 시작 | 첫 번째 명령으로 로봇의 동작을 수행하기 시작합니다. 또는 이전에 시작한 프로그램을 계속 실행합니다. |
| 일시 중지 | 이전에 시작한 프로그램의 실행을 일시 중단합니다. |
| 중지 | 프로그램 실행을 취소하고 로봇의 움직임을 중지합니다. |









상태 패널에는 현재 실행 중인 KRL 프로그램, 준비 상태 및 속도 오버라이드 표시기, 현재 로봇 위치에 대한 정보가 포함되어 있습니다.
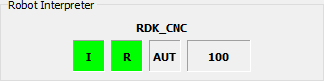
로봇 통역사 패널에는 네 가지 표시기가 있습니다:
로봇 드라이브 및 모션 |
| 로봇의 드라이브가 켜지고 로봇이 움직일 준비가 되었습니다. |
| 로봇 액추에이터가 꺼져 있고 로봇을 작동할 준비가 되지 않았습니다. | |
KRL 프로그램 현황 |
| 로봇 프로그램이 로드되지 않았습니다. |
| 로봇 프로그램이 로드되어 실행할 준비가 되었습니다. | |
| 로봇 프로그램이 실행 중입니다. | |
| 로봇 프로그램이 오류로 인해 중단되었습니다. | |
| 로봇 프로그램이 완전히 실행되었습니다. | |
로봇 컨트롤러 모드 |
| 로봇 제어 시스템의 현재 작동 모드입니다. 다음 값을 사용할 수 있습니다: T1, T2, AUT, EXT. |
속도 오버라이드 |
| 프로그램 실행 속도 오버라이드 값은 0에서 100 사이의 퍼센트 단위입니다. |









워크플로우 예시
이섹션에서는 RoboDK CNC를사용하여 KUKA 컨트롤러에서프로그램을실행하는단계를설명합니다.
1.RoboDK CNC 애플리케이션실행: 플러그인이활성화된상태에서유틸리티➔ RoboDK CNC를 선택합니다.
2.C3 브리지 인터페이스 서버를 실행하여원격로봇제어시스템에연결합니다.
3.애플리케이션을처음실행하거나로봇제어시스템에서 RoboDK CNC를사용한적이없는경우, 시작하기전에자동구성이필요합니다. 로봇➔ 구성... 메뉴를사용하여실행합니다.
4.RoboDK CNC 포스트 프로세서를 사용하여생성된 CSV 프로그램파일을엽니다.
5.로봇이작동할준비가되었는지확인합니다. 드라이브가켜져있고원하는실행모드와속도설정이설정되어있는지확인합니다.
6.시작 버튼을눌러프로그램실행을시작합니다.