사용자
중요: 로봇또는도구와충돌을일으킬수있는모든물체를셀로드 3D 모델에모델링하는것이좋습니다. 로봇과충돌을일으킬수있는도구(또는기타잠재적인충돌)가있는경우다음섹션에설명된대로사용자지정설정을진행하는것이좋습니다.
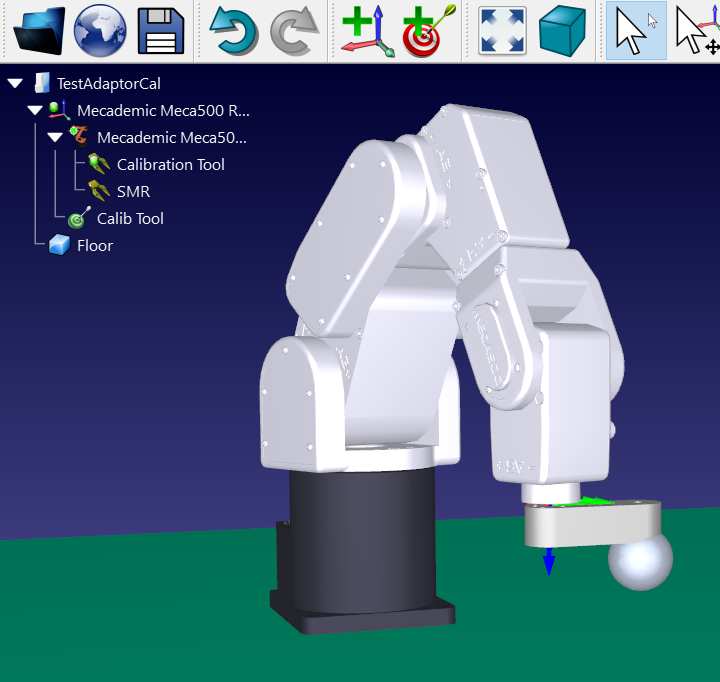
선택적으로다음단계를따라셀의 3D 환경을올바르게모델링할수있습니다.
1.도구의 3D 모델을로드하고 RoboDK에서도구를만듭니다. 자세한내용은 도구 만들기 섹션을 참조하세요.
2.셀을모델링할 3D 파일을로드합니다. 3D STEP, IGES, STL 파일을로드할수있습니다. 자세한내용은시작하기섹션을참조하세요.
참고: 충돌을피하려면셀을올바르게모델링하는것이좋습니다.
팁: 도구중심점에대한정확한추정치가있는경우 RoboDK에서이를설정하고추정도구를업데이트하면보정절차를더빠르게진행할수있습니다.