요구
자동화된도구보정을수행하려면 RoboDK TwinTool 앱을설치하고호환되는센서가있어야합니다.
다음사항을준비하세요:
1.하나이상의로봇팔.
2.호환되는다이얼인디케이터(LVDT 또는선형게이지라고도함).
3.로봇자동캘리브레이션을위한 RoboDK 소프트웨어가설치되어있어야하며적절한라이선스를사용할수있어야합니다.
4.로봇컨트롤러와호환되는 로봇 드라이버가 필요합니다.
5.RoboDK 트윈툴 앱을 설치합니다:
a.RoboDK TwinTool 앱다운로드 (다운로드링크는 RoboDK에문의)
b.파일을두번클릭하여앱을설치하고 RoboDK에서엽니다.
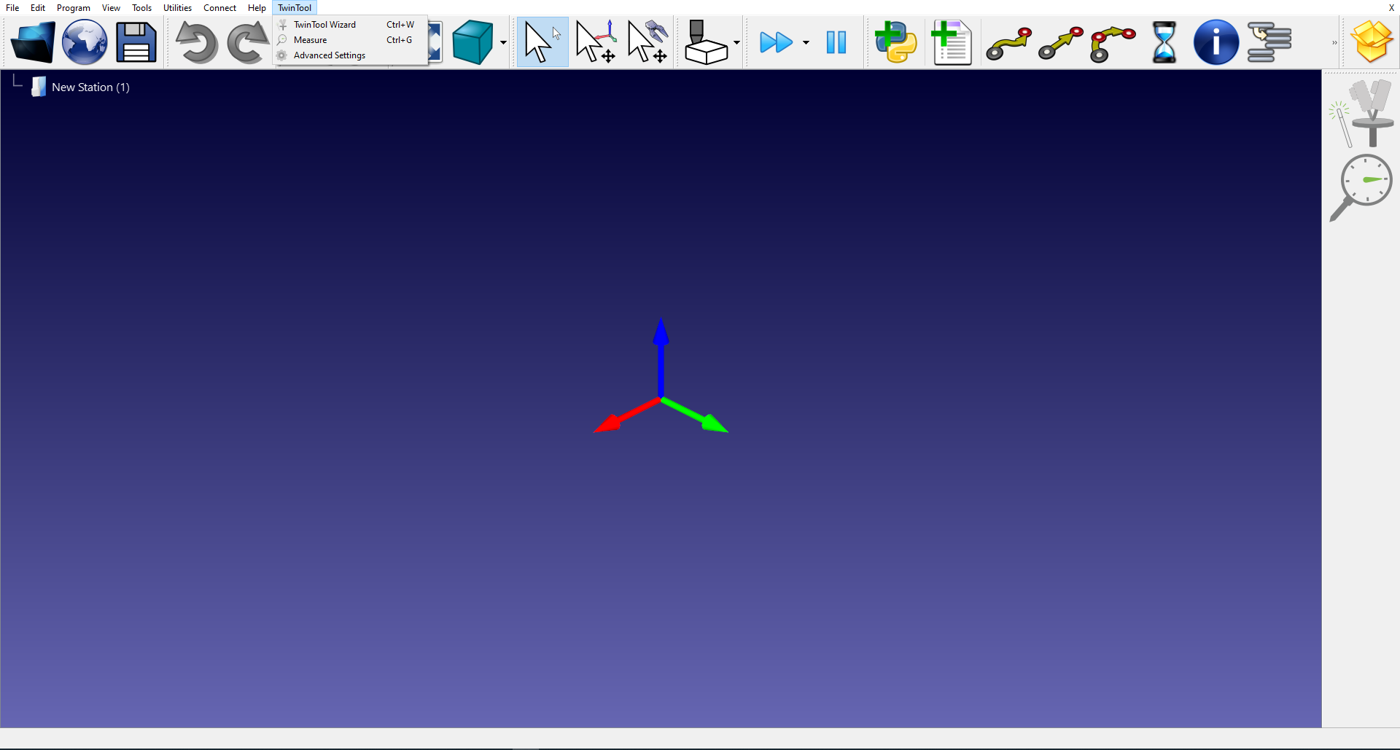
c.도구➔ 앱을 선택하고트윈툴을 더블클릭하면트윈툴툴바및메뉴가표시됩니다
TwinTool 앱이보이지않는경우, 앱을제대로설치하려면 RoboDK를닫고관리자권한으로다시시작해야합니다.
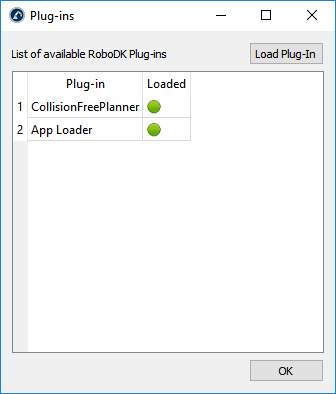
참고: RoboDK 앱을사용하려면앱로더플러그인을활성화해야합니다. 이플러그인은 rdkp 파일을더블클릭하면자동으로로드됩니다. 그렇지않은경우도구➔ 플러그인 로드에서 앱 로더 플러그인을로드할수있습니다.
중요: 트윈툴앱은종속요소를자동으로다운로드하고설치하므로인터넷연결이필요합니다. 그러나다른컴퓨터에서이러한종속요소를다운로드할수있습니다.
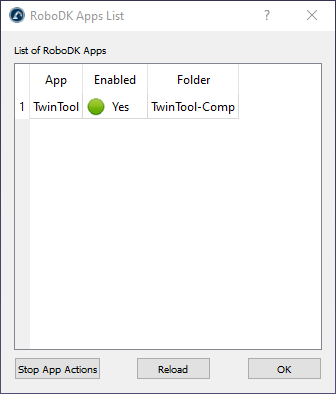
참고: 트윈툴메뉴와도구모음은자동으로표시될수있습니다. 도구➔ 앱 목록을 선택하고앱의활성화태그를두번클릭하여트윈툴앱(또는다른앱)을표시하거나숨길있습니다.