캘리브레이션
보정시퀀스가완료되면마법사의
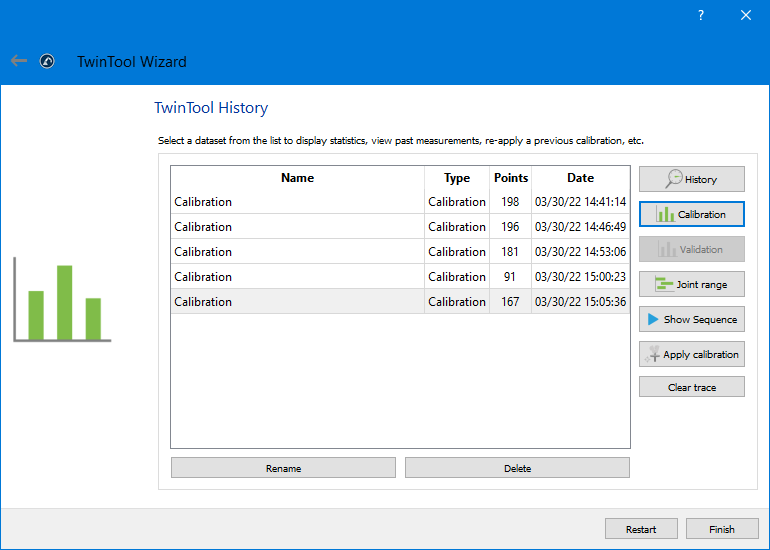
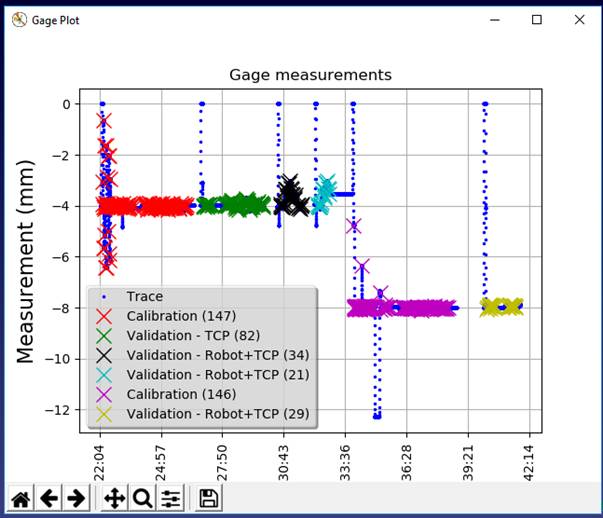
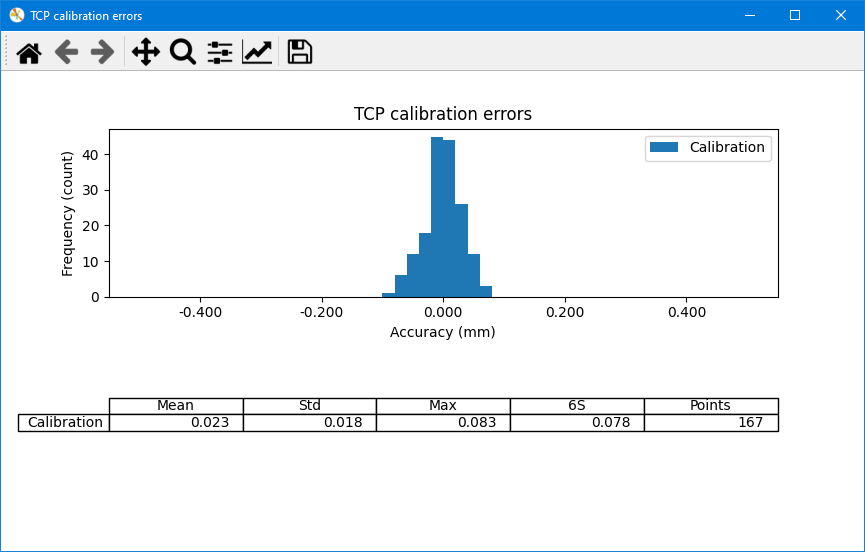
보정 버튼을클릭하면보정결과를보여주는차트를볼수있습니다. 공구중심점(TCP)은공칭로봇운동학을사용하여계산됩니다.
참고: 다른포인트세트로캘리브레이션시퀀스를다시시작하려면 TwinTool➔
팁: 최상의정확도결과를얻으려면다양한로봇구성으로도구를보정하는것이중요합니다. 예를들어로봇을플립위치(조인트 5 네거티브)로처음보정시퀀스를실행한경우, 플립위치가아닌새대상(조인트 5 포지티브)을학습시키고보정시퀀스를다시실행할수있습니다.