TwinTool을사용하여도구(TCP)를캘리브레이션하려면 RoboDK에서로봇을로드하고센서와로봇이연결되어있는지확인해야합니다. 선택적으로물체와도구의 3D 모델을추가하여셀을모델링할수있습니다. 이렇게하면자동으로충돌을피할수있습니다.
1.로봇을로드합니다:
a.파일 선택➔ 온라인 라이브러리 열기. 온라인라이브러리가 RoboDK에표시됩니다.
b.필터를사용하여로봇을찾습니다.
c.열기를 선택하면로봇이 RoboDK 스테이션에자동으로로드됩니다.
d.또는라이브러리(https://robodk.com/library)에서로봇파일을직접다운로드하고 RoboDK(.robot 파일)로파일을열수있습니다.
2.센서를연결합니다:
a.센서를컴퓨터에연결합니다.
b.TwinTool➔ 측정하기를 선택합니다.
측정하기를 선택합니다.
c.센서가측정중이고측정값이안정적인지확인합니다.
참고: 센서에바로연결할수없는경우연결설정을편집하고저장하여다음단계에서나중에사용할수있습니다.
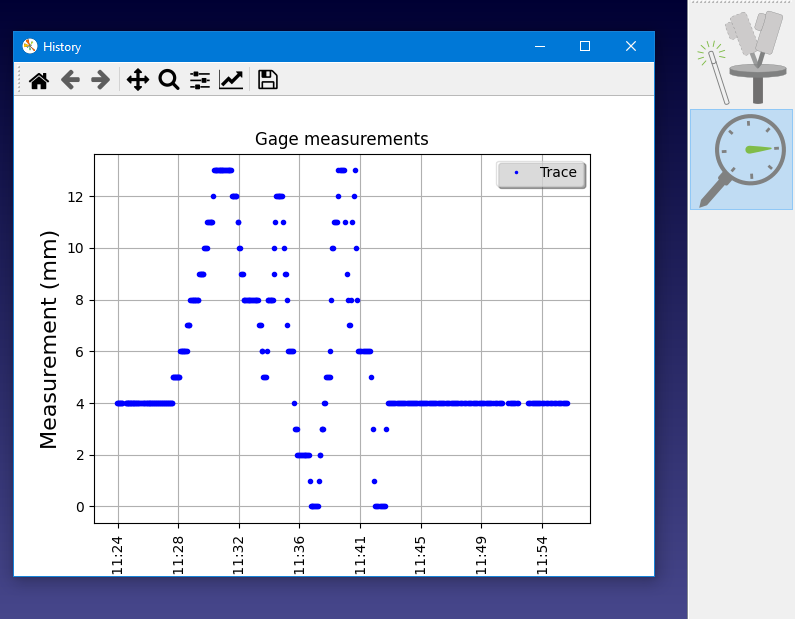
중요: 근처의진동이측정값을변경하지않는지확인하여설정이보정을위해충분히견고한지확인하세요. 예를들어로봇을센서위에올려놓고센서근처를걷는등작은진동을만들어보세요. 측정값은 0.005mm 미만의노이즈내에서안정적으로유지되어야합니다. 그렇지않은경우센서및/또는로봇베이스의지지대를강화할것을강력히권장합니다.
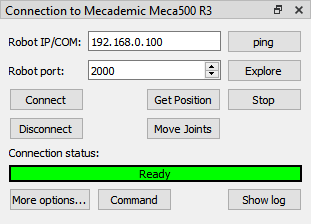
3.로봇을연결합니다:
a.연결➔ 로봇 연결을 선택합니다.
b.로봇 IP와포트를입력합니다.
c.연결을 선택합니다.
참고: 일부로봇컨트롤러는특정설정또는특정소프트웨어옵션을따라야합니다. 자세한내용은
로봇 드라이버 섹션을참조하세요.
4.로봇연결패널에서위치 가져오기를 선택합니다. 이단계는 RoboDK에서로봇의위치를업데이트합니다.
중요: 로봇또는도구와충돌을일으킬수있는모든물체를셀로드 3D 모델에모델링하는것이좋습니다. 로봇과충돌을일으킬수있는도구(또는기타잠재적인충돌)가있는경우다음섹션에설명된대로사용자지정설정을진행하는것이좋습니다.
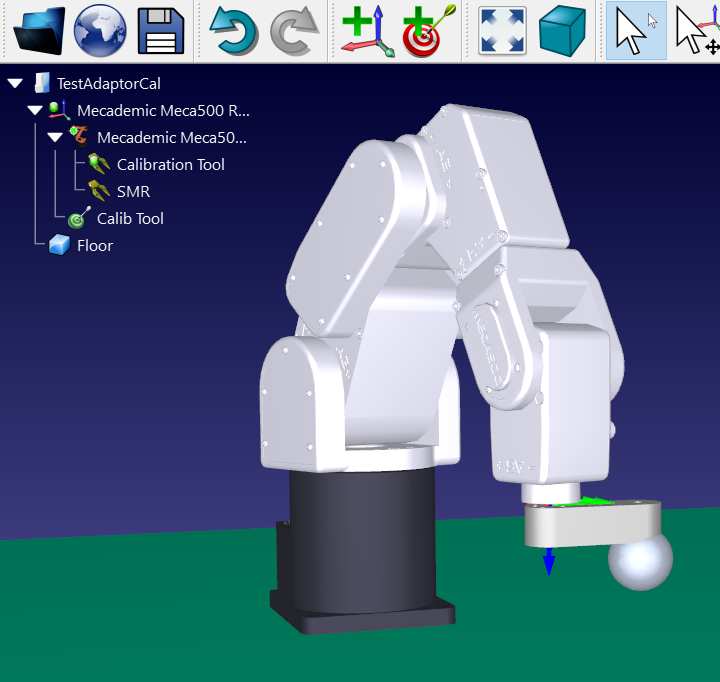
선택적으로다음단계를따라셀의 3D 환경을올바르게모델링할수있습니다.
1.도구의 3D 모델을로드하고 RoboDK에서도구를만듭니다. 자세한내용은 도구 만들기 섹션을 참조하세요.
2.셀을모델링할 3D 파일을로드합니다. 3D STEP, IGES, STL 파일을로드할수있습니다. 자세한내용은시작하기섹션을참조하세요.
참고: 충돌을피하려면셀을올바르게모델링하는것이좋습니다.
팁: 도구중심점에대한정확한추정치가있는경우 RoboDK에서이를설정하고추정도구를업데이트하면보정절차를더빠르게진행할수있습니다.
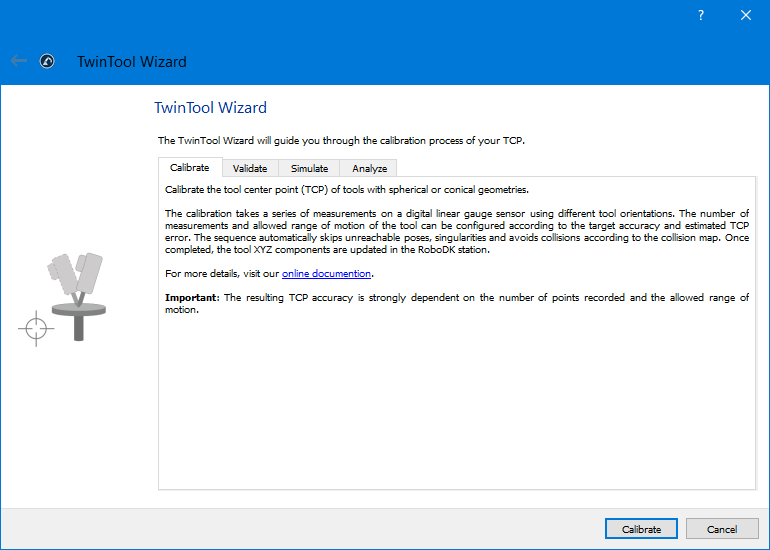
보정절차를시작하려면 TwinTool➔ TwinTool 마법사를 선택하기만하면됩니다.
TwinTool 마법사를 선택하기만하면됩니다.
마법사를시작하면 캘리브레이션,
캘리브레이션, 검증 또는
검증 또는 시뮬레이션 설정으로안내됩니다. 여기에는센서연결설정, 로봇의유효한상태확인및주요매개변수검토가포함됩니다. 화면의단계를따르고추가세부정보가필요한경우도구도움말을참조하세요.
시뮬레이션 설정으로안내됩니다. 여기에는센서연결설정, 로봇의유효한상태확인및주요매개변수검토가포함됩니다. 화면의단계를따르고추가세부정보가필요한경우도구도움말을참조하세요.
중요: 연결된로봇에서보정하기전에시뮬레이션모드에서보정시퀀스를한번이상실행하는것이좋습니다.
중요: 시뮬레이션된시퀀스는보정또는유효성검사에사용된실제시퀀스와일치하지않을수있습니다. 로봇경로는자동으로조정됩니다.
팁: 로봇위치의조인트타겟을 '구경타겟'이라는다른이름을사용하여센서에저장합니다. 이를재사용하여로봇을제자리로빠르게이동할수있습니다.
팁: 이미정확한 TCP 예상값이있는경우예상공구오차를 5mm 이하로설정하세요. 이렇게하면보정절차가더빨라집니다.
팁: 팁: 로봇의동작범위를변경하려면 Z 및 XY에서조인트범위를변경하세요.