유효성
캘리브레이션시퀀스를실행한후에는몇가지검증테스트를실행할수있습니다. 이러한유효성검사테스트는센서의동일한위치또는다른위치에서수행할수있습니다.
중요: 선형게이지의서로다른위치에서수행한여러보정시퀀스를결합할수없습니다. 로봇을같은위치에서두번이상캘리브레이션할수있으며센서의같은위치에서수집된모든데이터가캘리브레이션에사용됩니다.
도구 캘리브레이션 유효성 검사
마법사에서

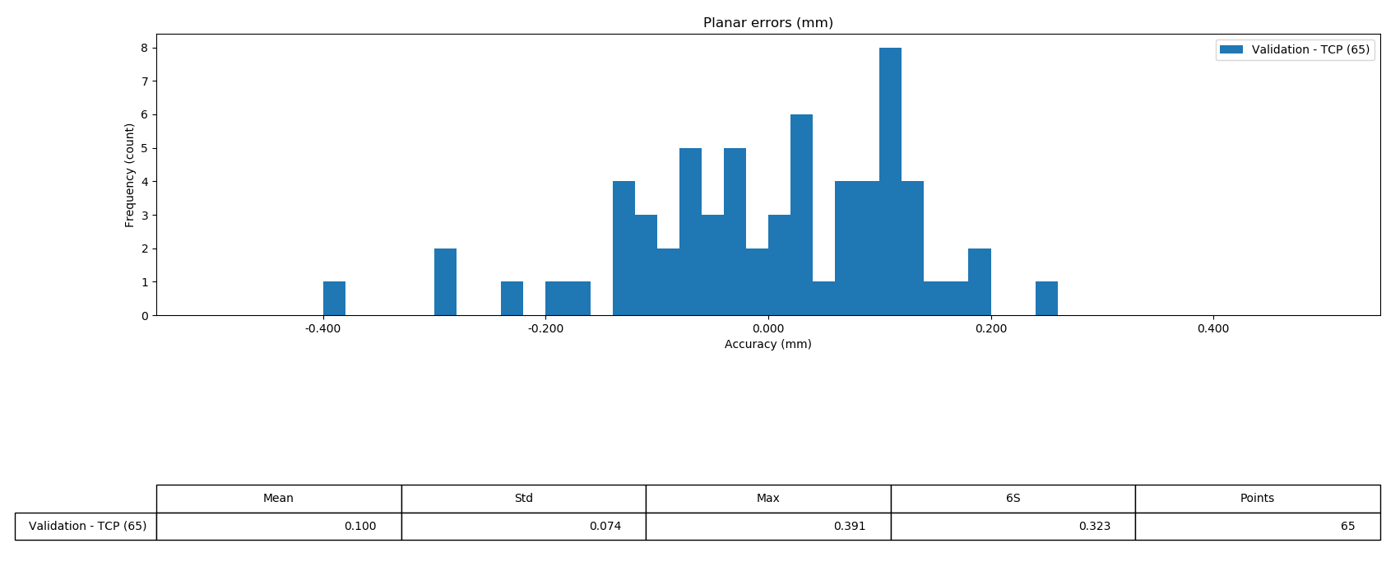
유효성 검사를선택하면결과에대한요약과일부통계가표시됩니다. 이러한통계는센서가감지한평면오류에해당합니다.
팁: 보정을위해더많은측정을수행하면보정결과를현저하게개선할수있습니다. 센서타겟측정을변경할수있습니다(예: 두번째보정을위해기본 4mm 타겟을사용한후 8mm 타겟을사용). 로봇구성을변경하여동일한지점에서다른조인트각도로측정할수도있습니다(예: 플립및비플립구성사용).