캘리브레이션
보정절차를시작하려면 TwinTool➔
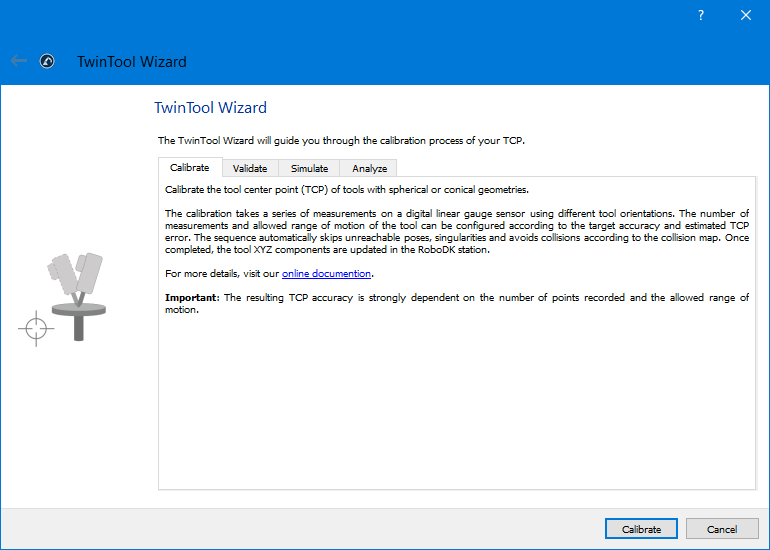
마법사를시작하면


중요: 연결된로봇에서보정하기전에시뮬레이션모드에서보정시퀀스를한번이상실행하는것이좋습니다.
중요: 시뮬레이션된시퀀스는보정또는유효성검사에사용된실제시퀀스와일치하지않을수있습니다. 로봇경로는자동으로조정됩니다.
팁: 로봇위치의조인트타겟을 '구경타겟'이라는다른이름을사용하여센서에저장합니다. 이를재사용하여로봇을제자리로빠르게이동할수있습니다.
팁: 이미정확한 TCP 예상값이있는경우예상공구오차를 5mm 이하로설정하세요. 이렇게하면보정절차가더빨라집니다.
팁: 팁: 로봇의동작범위를변경하려면 Z 및 XY에서조인트범위를변경하세요.