RoboDK TwinTool
트윈툴 소개
RoboDK TwinTool 보정을사용하면공구중심점(TCP)을자동으로보정할수있습니다. 산업용로봇은반복성은높지만정확도는높지않습니다. 따라서로봇및공구보정을통해산업용로봇의정확도를향상시킬수있습니다. 보정하지않으면로봇정확도는로봇브랜드와모델에따라크게달라집니다.

RoboDK TwinTool은공구중심점(TCP)을보정하고검증하는데사용할수있습니다 . TwinTool은구형또는원뿔형형상을가진공구의 TCP를정확하게보정할수있습니다.
1.구형도구➔도구의중심이보정됩니다.
2.원뿔형도구➔도구의끝이보정되었습니다.
요구 사항
자동화된도구보정을수행하려면 RoboDK TwinTool 앱을설치하고호환되는센서가있어야합니다.
다음사항을준비하세요:
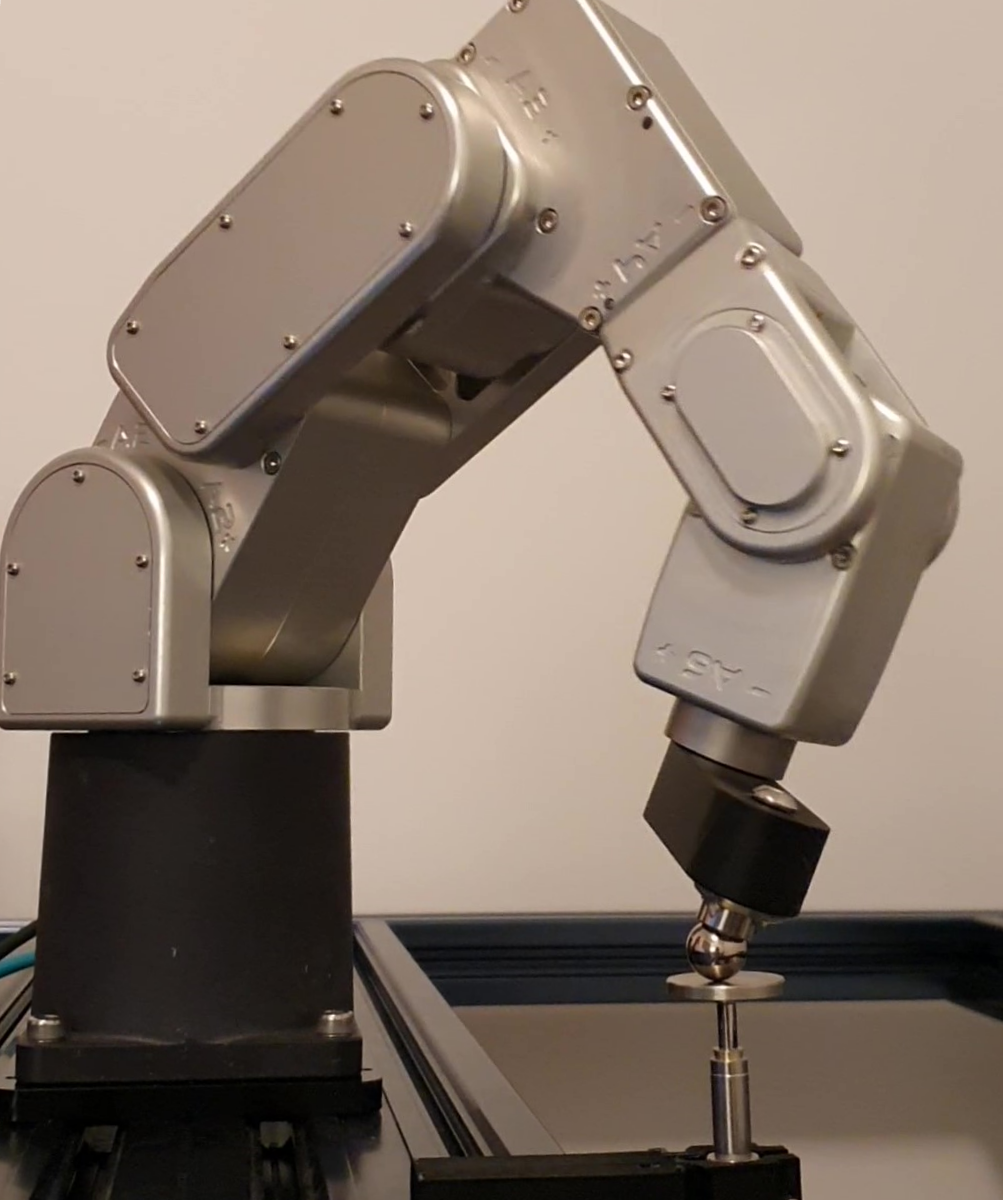
1.하나이상의로봇팔.
2.호환되는다이얼인디케이터(LVDT 또는선형게이지라고도함).
3.로봇자동캘리브레이션을위한 RoboDK 소프트웨어가설치되어있어야하며적절한라이선스를사용할수있어야합니다.
4.로봇컨트롤러와호환되는 로봇 드라이버가 필요합니다.
5.RoboDK 트윈툴 앱을 설치합니다:
a.RoboDK TwinTool 앱다운로드 (다운로드링크는 RoboDK에문의)
b.파일을두번클릭하여앱을설치하고 RoboDK에서엽니다.
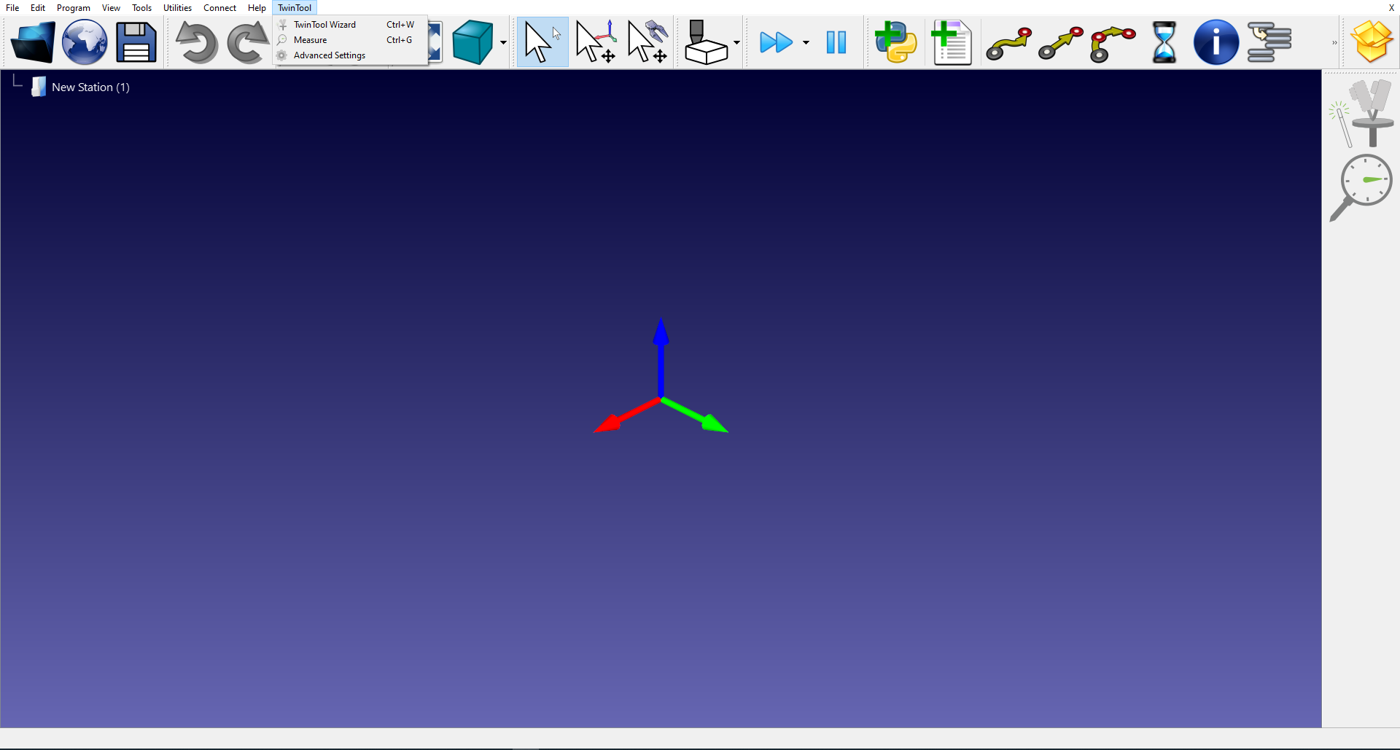
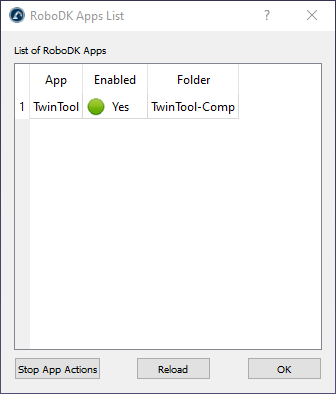
c.도구➔ 앱을 선택하고트윈툴을 더블클릭하면트윈툴툴바및메뉴가표시됩니다
TwinTool 앱이보이지않는경우, 앱을제대로설치하려면 RoboDK를닫고관리자권한으로다시시작해야합니다.
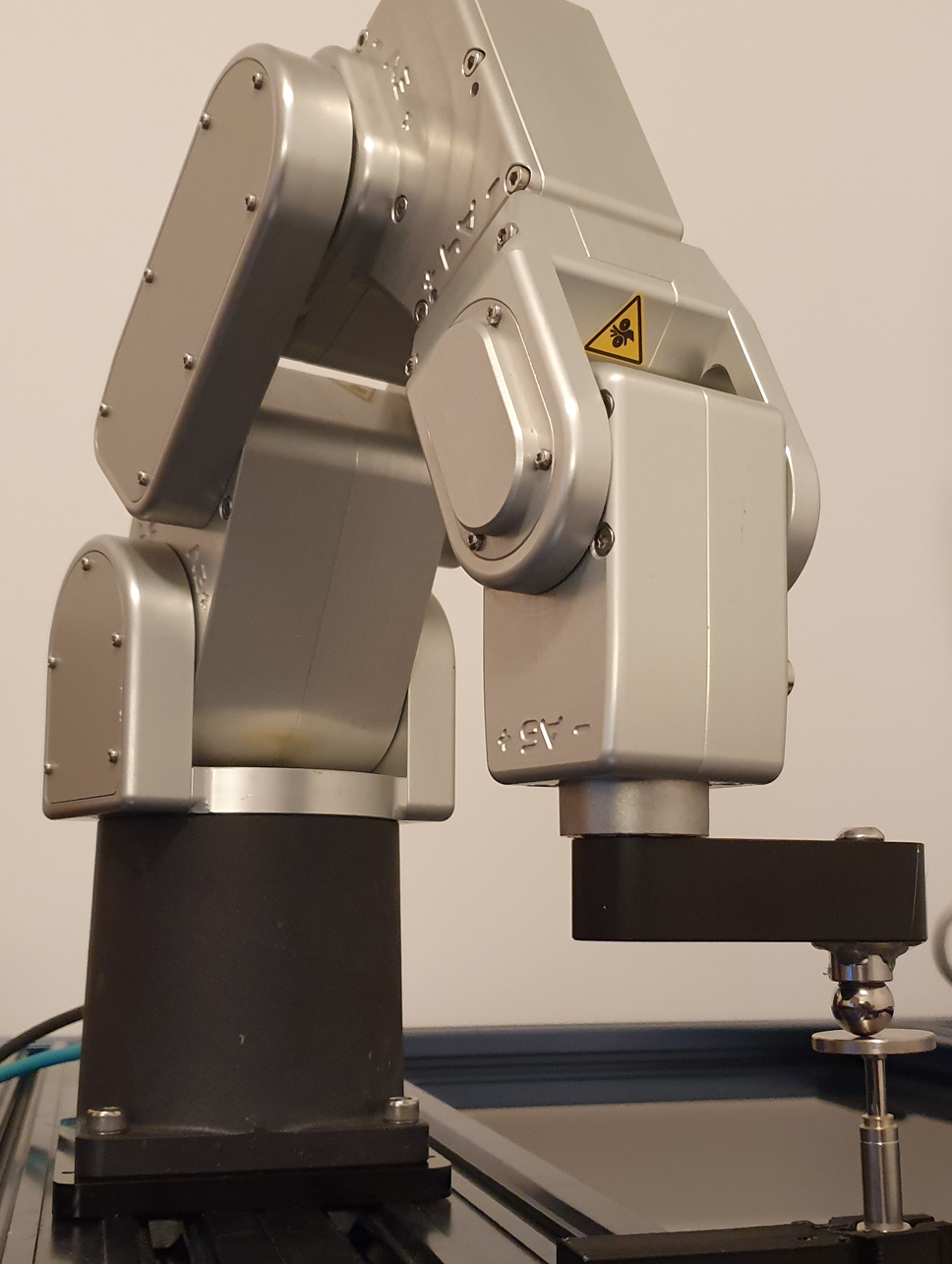
선형 게이지 센서
RoboDK TwinTool은키엔스, 미투요, 실박등여러선형게이지센서를지원합니다. 일부통신프로토콜에는 USB, 이더넷/IP 및 RS232가포함됩니다. 산업용선형게이지센서의대략적인가격은 1,500.00유로입니다.
선형게이지센서는정확도가 0.005mm 이상이고이동거리가 10mm 이상이어야합니다. 측정빈도는초당 50개이상의샘플을측정하는것이좋습니다. 이센서는 RoboDK에서제공하거나판매하지않습니다. RoboDK TwinTool을사용하는데필요한이센서는현지유통업체에문의하여공급받는것이좋습니다.
다음목록은키엔스선형게이지의샘플주문을보여줍니다:
●키엔스 GT2-P12 - 펜슬타입게이지
●GT2-UB1 - USB 연결유닛
●OP-87716 - 케이블연장
●OP-76875 - 게이지용권장장착브래킷
●M2.5x0.25 나사산이있는 25mm 평면접점필요(키엔스에서제공하지않음)
다음목록은미투토요선형게이지의샘플주문을보여줍니다:
●미투요 542-191 - LG 100 게이지
●미쓰토요 542-081A - EJ 카운터 + AC
●미투요 21HZA149 - USB 인터페이스(RS232도지원)
●M2.5x0.25 나사산이필요한 25mm 평면접점(미투토요미제공)
캘리브레이션 설정
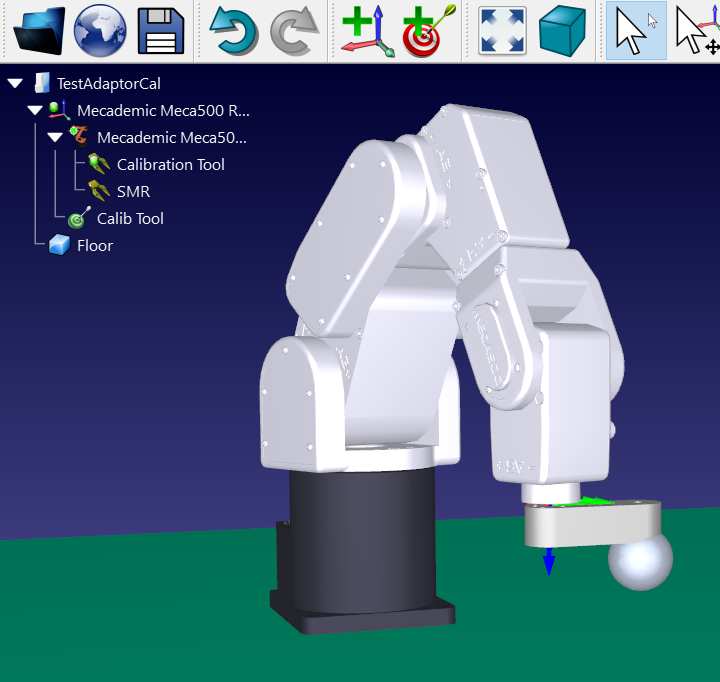
TwinTool을사용하여도구(TCP)를캘리브레이션하려면 RoboDK에서로봇을로드하고센서와로봇이연결되어있는지확인해야합니다. 선택적으로물체와도구의 3D 모델을추가하여셀을모델링할수있습니다. 이렇게하면자동으로충돌을피할수있습니다.
1.로봇을로드합니다:
a.파일 선택➔ 온라인 라이브러리 열기. 온라인라이브러리가 RoboDK에표시됩니다.
b.필터를사용하여로봇을찾습니다.
c.열기를 선택하면로봇이 RoboDK 스테이션에자동으로로드됩니다.
d.또는라이브러리(https://robodk.com/library)에서로봇파일을직접다운로드하고 RoboDK(.robot 파일)로파일을열수있습니다.
2.센서를연결합니다:
a.센서를컴퓨터에연결합니다.
b.TwinTool➔
c.센서가측정중이고측정값이안정적인지확인합니다.
3.로봇을연결합니다:
a.연결➔ 로봇 연결을 선택합니다.
b.로봇 IP와포트를입력합니다.
c.연결을 선택합니다.
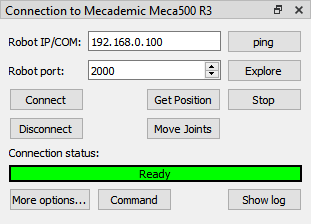
4.로봇연결패널에서위치 가져오기를 선택합니다. 이단계는 RoboDK에서로봇의위치를업데이트합니다.
사용자 지정 설정
선택적으로다음단계를따라셀의 3D 환경을올바르게모델링할수있습니다.
1.도구의 3D 모델을로드하고 RoboDK에서도구를만듭니다. 자세한내용은 도구 만들기 섹션을 참조하세요.
2.셀을모델링할 3D 파일을로드합니다. 3D STEP, IGES, STL 파일을로드할수있습니다. 자세한내용은시작하기섹션을참조하세요.
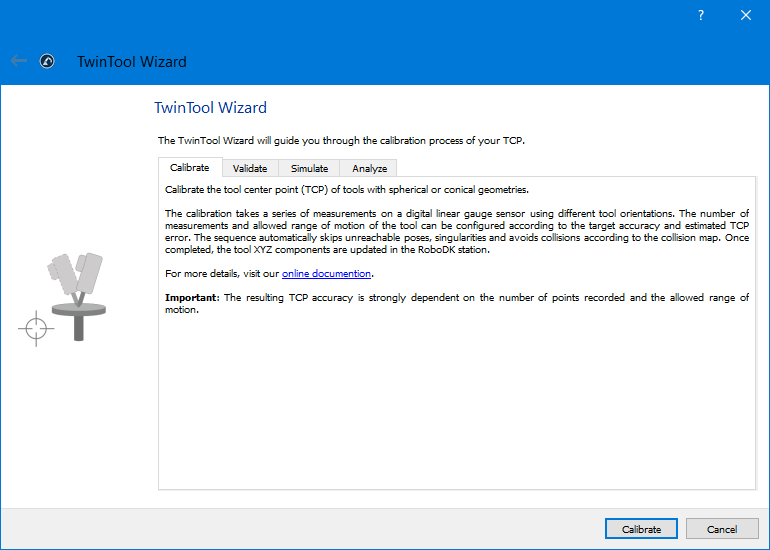
캘리브레이션 마법사
보정절차를시작하려면 TwinTool➔
마법사를시작하면


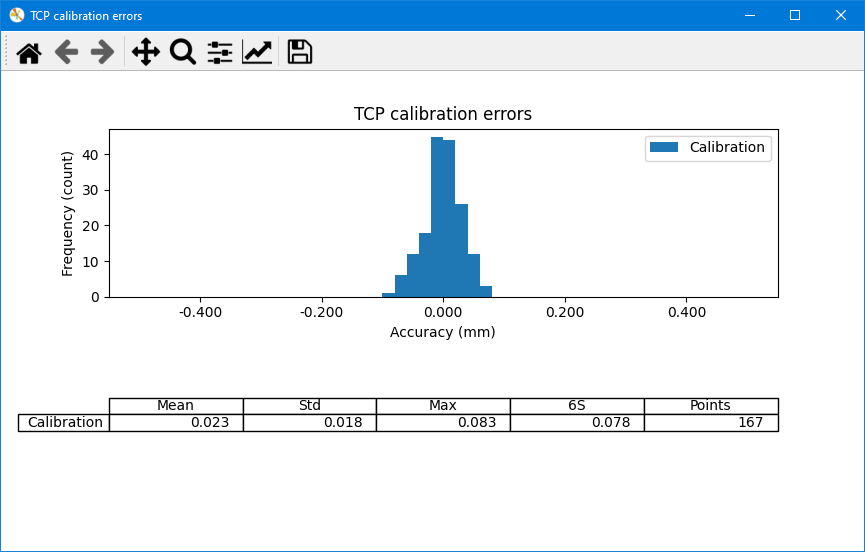
캘리브레이션 결과
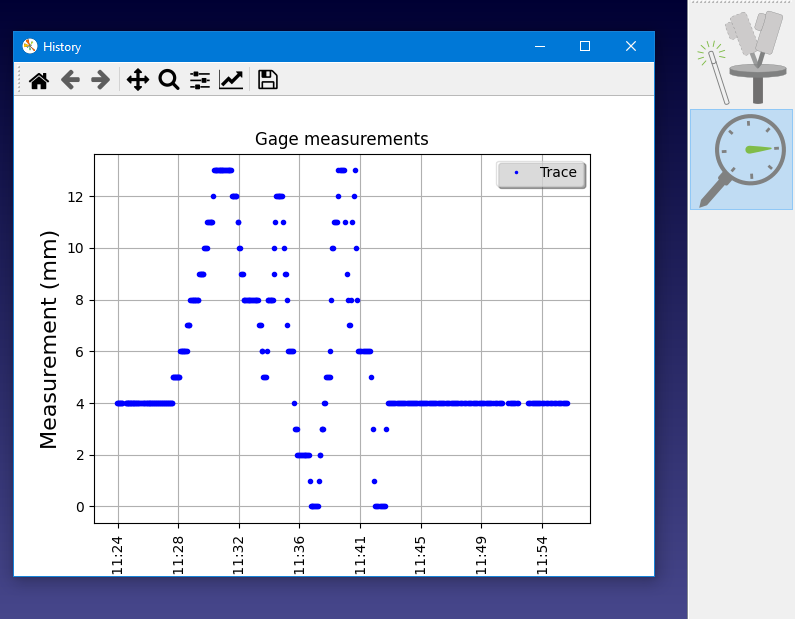
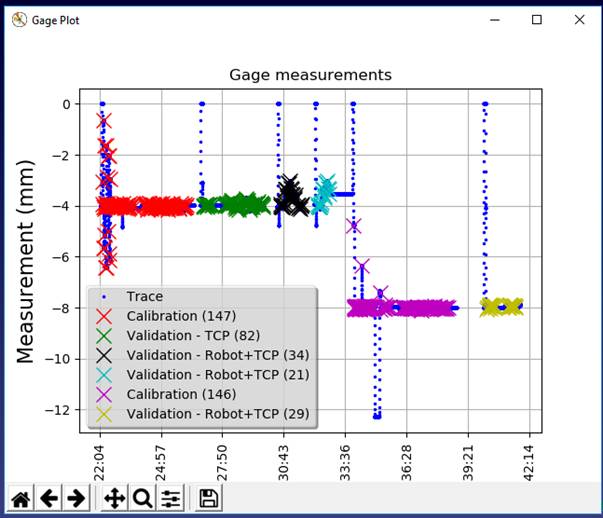
보정시퀀스가완료되면마법사의
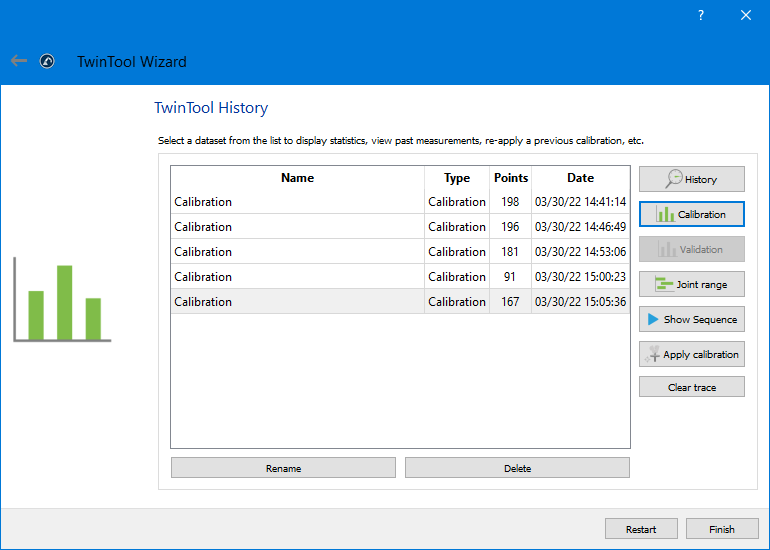
보정 버튼을클릭하면보정결과를보여주는차트를볼수있습니다. 공구중심점(TCP)은공칭로봇운동학을사용하여계산됩니다.
유효성 검사
캘리브레이션시퀀스를실행한후에는몇가지검증테스트를실행할수있습니다. 이러한유효성검사테스트는센서의동일한위치또는다른위치에서수행할수있습니다.
도구 캘리브레이션 유효성 검사
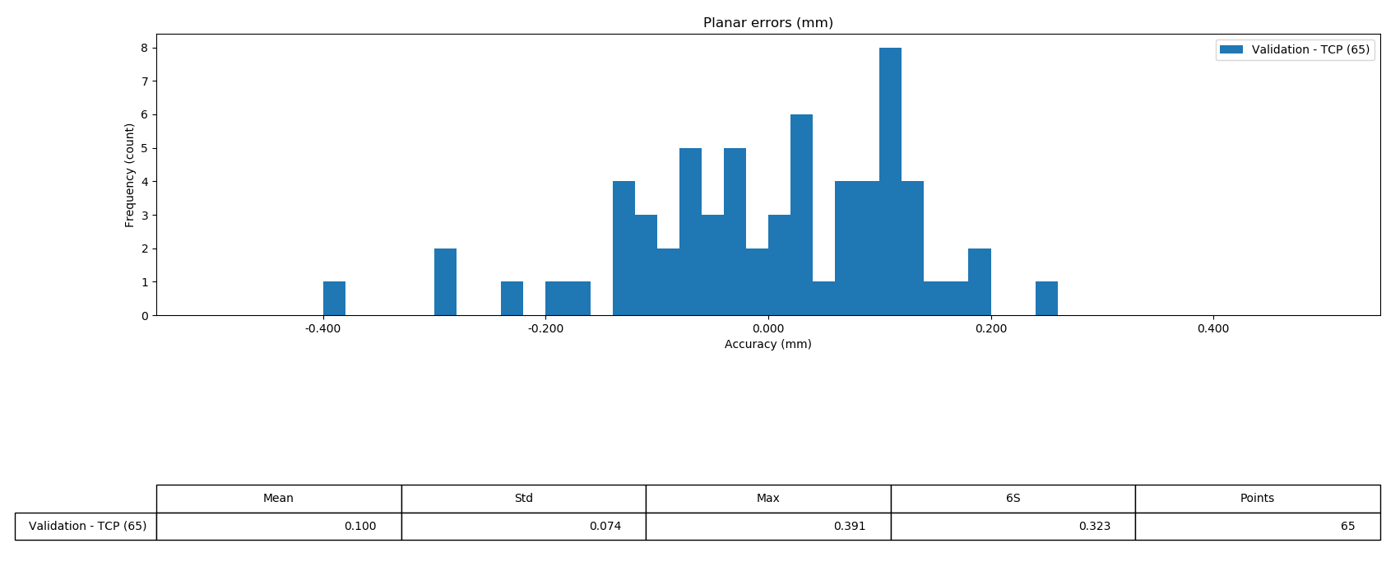
마법사에서
유효성 검사를선택하면결과에대한요약과일부통계가표시됩니다. 이러한통계는센서가감지한평면오류에해당합니다.
설정
이섹션에서는보정을더잘사용자지정하고로봇정확도를테스트하기위해수정할수있는추가설정및옵션에대해설명합니다.
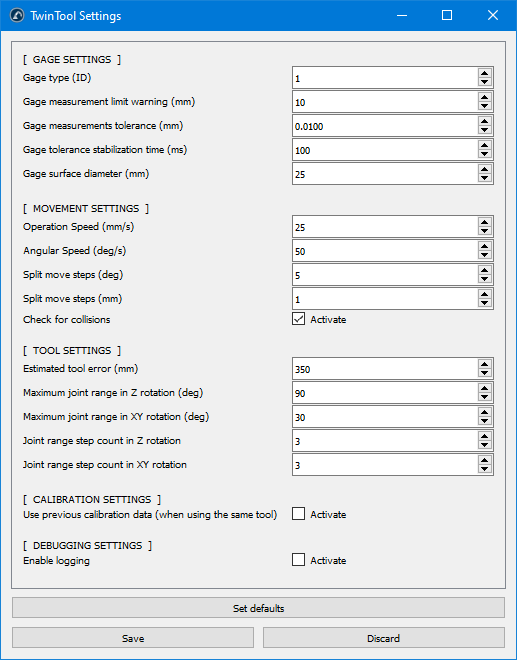
보정 설정
트윈툴➔ 고급 설정을 선택하면고급설정의전체목록이열립니다. 이러한설정의대부분은마법사를 통해메시지가표시되고설정할수있습니다.