기준
먼저두가지모델이필요합니다. 하나의툴모델과하나의기본기준좌표계모델입니다. 하나의모델은모델기준(툴또는기본기준좌표계)과관련하여대상에해당하는점(X, Y, Z 좌표) 목록으로정의된하나의객체입니다. 필요에따라 HandyProbe를사용하여기준좌표계를배치할수있습니다.
툴및기본모델을정의하려면이단계를두번수행해야합니다.
1.VXelements를시작하고트래커를연결하십시오. 필요한경우추적기및 HandyProbe를교정하십시오.
2.VXelements의왼쪽트리에서모델 찾기를선택하고모델 검색을선택합니다. 모델(툴또는객체)에해당하는대상을선택하고 "선택"을선택하십시오.
팁: CTRL을누른상태에서대상그룹을선택하십시오.

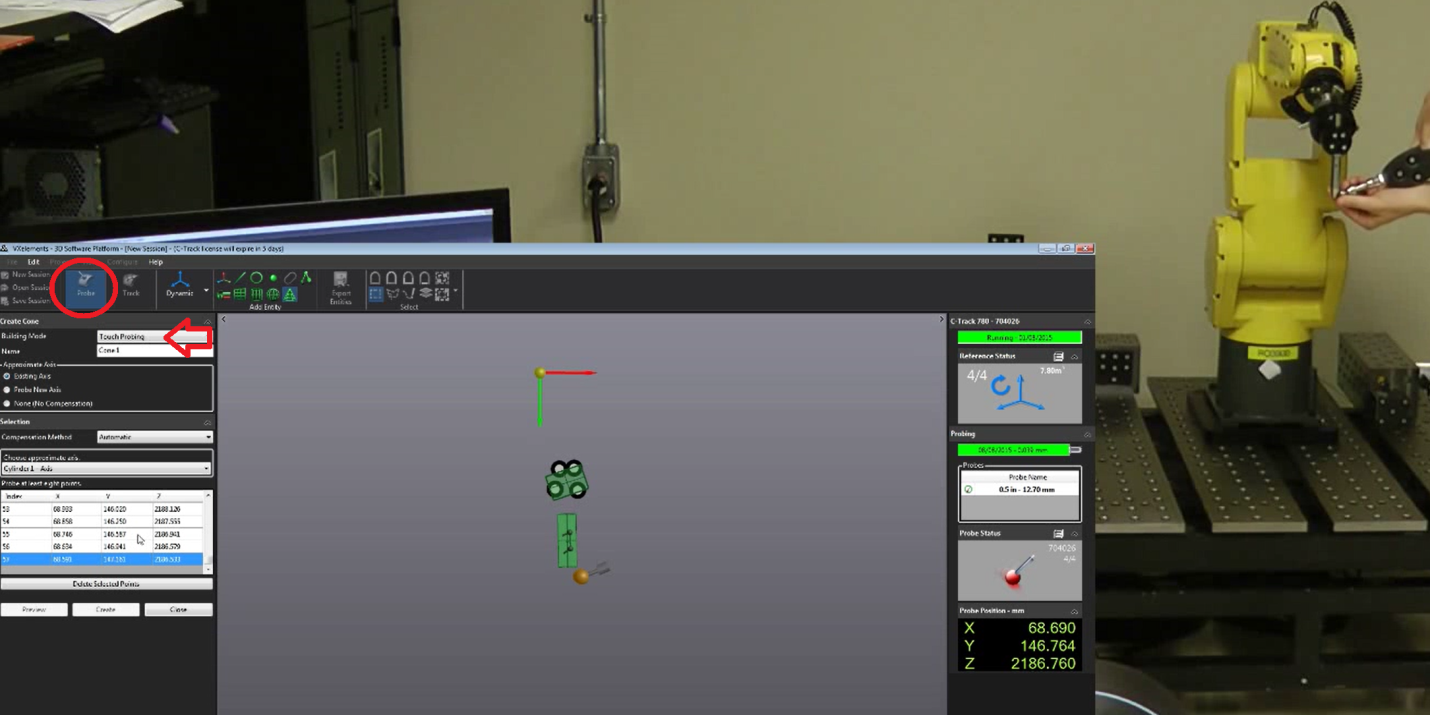
3.객체의기준좌표계는객체의특정특징에대하여특정위치에배치될수있습니다. 이단계는선택사항이지만로봇플랜지와관련하여 TCP 기능을정확하게배치해야하는경우권장됩니다. 예를들어스핀들축으로사용되는기준실린더를따라공구의 Z 축을정확하게배치할수있습니다. 객체의기준좌표계를올바르게이동하려면 HandyProbe를사용하고이러한기능을가상 VXelements 세션에서가져와야합니다. 사용되는모델은형상이이모델과관련하여측정되도록위치결정모델로정의되어야합니다. 점, 선, 평면, 원통, 원뿔을측정하고이러한기능과관련하여기준좌표계를정의할수있습니다.
완료되면모델을 txt 파일로내보낼수있습니다. 텍스트파일에서대상을 XYZ 포인트목록으로볼수있습니다.
참고: 추적중인객체가매우복잡한경우 MaxShot 장치또는사진측량서비스를사용하여객체모델을올바르게정의할수있습니다. 이절차는더욱정확한결과를제공할수있습니다.