트래커
RoboDK에서통신을올바르게설정하려면트래커의 IP가필요합니다. VXelements가실행되고있지않은지확인하고다음단계에따라트래커와의통신을확인하십시오.
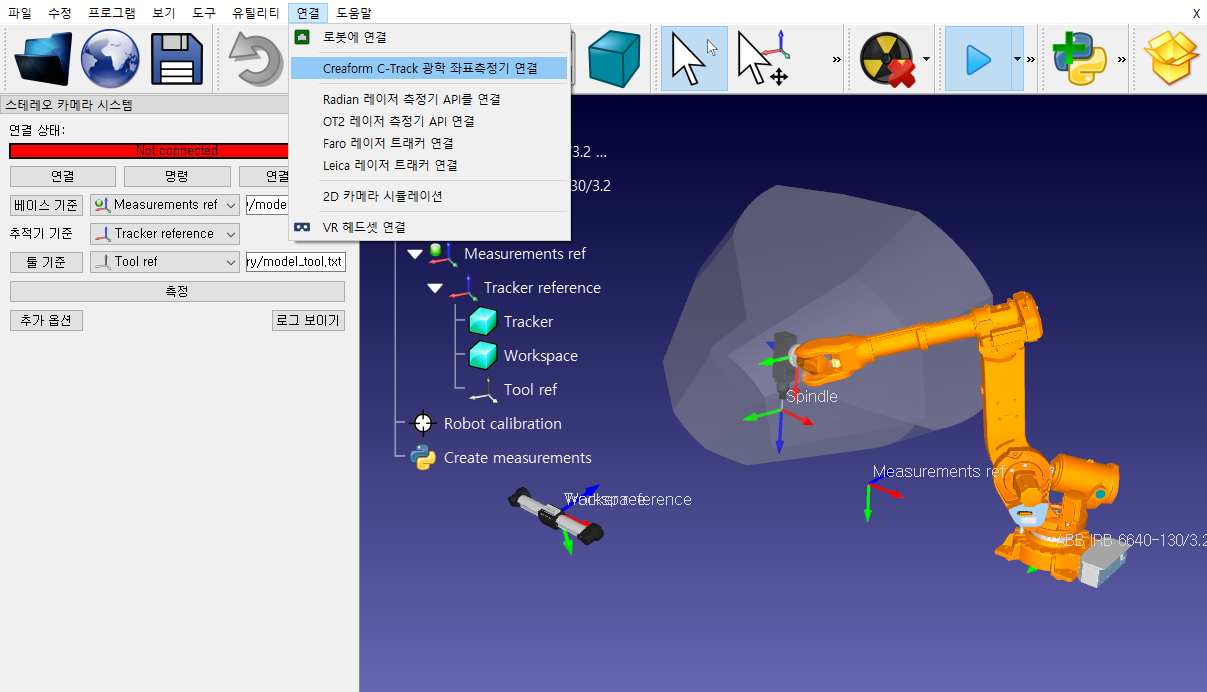
a.“연결➔스테레오카메라연결”메뉴를선택하십시오. 새로운창이열릴것입니다.
b.이전섹션에서생성된“기본모델”과“툴모델”을텍스트파일로입력하십시오. 이들은기준좌표계와툴좌표계를각각정의하는타겟의위치입니다.
c.“연결” 버튼을선택하십시오.
d.연결에성공하면기본및툴모델을텍스트파일(.txt)로제공해야합니다.
중요:모델의텍스트파일은 RoboDK 스테이션에저장되지않습니다. TXT 파일을외부에서수정하면다음에측정할때모델이자동으로업데이트됩니다.
VXelements의통합버전이시작되고몇초후에연결에성공하면“준비”라는녹색메시지가표시됩니다. VXelements 창이닫히고연결은활성상태로유지됩니다. 연결에실패하면 Windows 작업표시줄또는작업관리자에서VXelements 프로세스가백그라운드에서실행되고있지않은지확인해야합니다(“VXelementsApiImplementation”프로세스를강제로중지하려면 CTRL + ALT + DEL을선택하십시오). 연결을선택하여RoboDK와의연결을다시시도하십시오.