로봇
RoboDK와의통신을올바르게설정하려면로봇의 IP(또는 RS232 연결을위한 COM 포트번호)가필요합니다. 로봇과의통신을확인하려면다음단계를따르십시오.
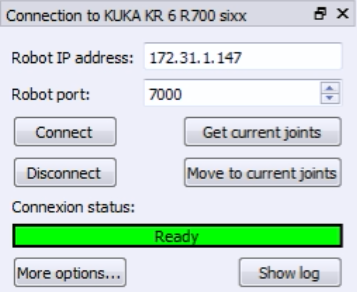
1.연결➔로봇 연결을선택하십시오. 새로운창이열릴것입니다.
2.로봇의 IP 및포트(또는 RS232를통한연결의경우 COM 포트)를설정하십시오.
3.연결버튼을클릭하십시오.
4.문제가발생하면부록을참조하십시오.
참고:보다많은정보는프로그램 섹션에서참고할수있습니다.
연결에성공하면준비완료를표시하는녹색메시지가표시됩니다. 위치 가져오기를선택하면가상로봇의위치가실제로봇의위치와정확히일치해야합니다. 또는로봇을시뮬레이터에설정된현재위치로이동하려면현재 조인트로 이동을선택하십시오. 창을닫을수있으며창이닫히더라도연결은활성상태로유지됩니다.
중요: "위치가져오기" 및 "여기로이동"을선택하면가상로봇의위치가실제로봇의위치와정확히일치해야합니다. 그렇지않은경우일부로봇설정이올바르지않을수있습니다.